윤영준_자율주행 RC카 제작 결과 보고서
활동 보고서
윤*준
2024-07-26
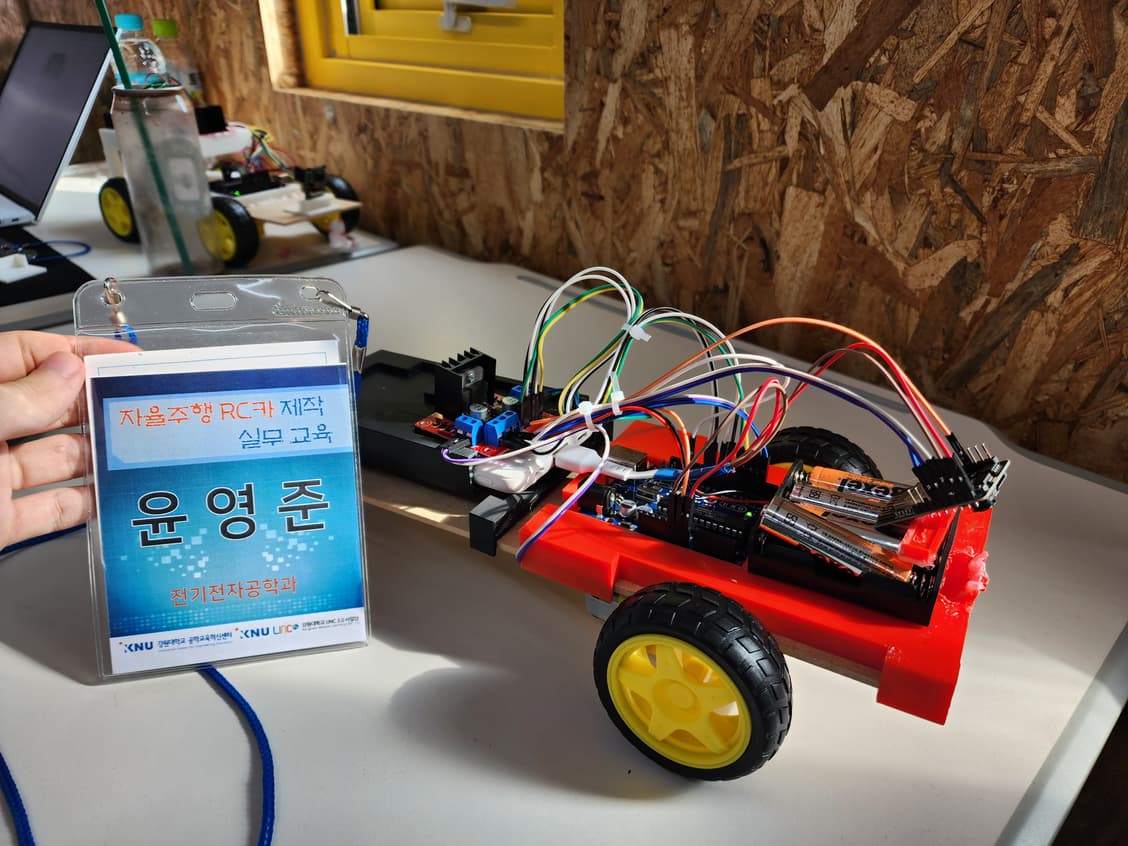
[프로젝트 개요] 3D 프린팅를 사용하여 직접 설계하고 아두이노와 esp32를 이용한 RCCAR를 제작. [설계 및 계획] 1. 지급된 나무 합판을 자르지 않고 그대로 이용 2. 3D프린팅을 이용해 부품을 '끼워 넣을 수 있게' 틀을 제작, 제작한 틀은 합판에 붙이는 것이 아닌 끼우는 형태이어야 하며, 다른 부품들도 언제든 교체할 수 있게 만든다. 3. 사륜 자동차로 제작, 전륜구동으로 움직임 [제작 과정] 사용 장비는 교육 과정에 따라감. 최종적으로 모터 2개, esp32 카메라를 사용하였음. 팅커캐드를 이용해 부품을 설계함. 합판의 폭, 두께를 측정해서 그 위에 체결하는 것을 목표로 한 직육면체를 만듦. 그 후 그 육면체 위에 올릴 아두이노 보드, 빵판 등의 크기를 측정하고 적당한 높이만큼 직육면체에서 파냄. 보드가 들어갈 홈의 경우 전원선이 빠져나올 수 있도록 벽면을 뚫음. 배터리는 직육면체의 옆면을 입구로하여 파내고, 그 위에 배터리와 모터 드라이브를 얹을 수 있도록 파냄. 3D프린터의 출력물 크기 제한으로 인해 위의 배터리와 아두이노 보드 부분을 분리하고, 배터리의 경우 육면체와 합판에 고정하는 부분을 분리함. 출력 결과 치수를 잘못 재거나, 딱 맞게 설계하여 부품이 잘 들어가지 않는 문제가 발생하여 칼로 파내거나 인두기로 성형함. 완성 후 왼쪽 앞바퀴가 공중에 떠서 헛도는 문제가 발생함. 무게중심이 뒤로 간 것이 원인으로 생각되어 뒷바퀴 2개를 제거하고 보조바퀴를 장착함. 그럼에도 헛 돌아서 보조바퀴를 고정하고, 왼쪽 앞바퀴를 떼어내고 글루건을 두껍게 발라 높이를 높여 해결함. 주행 중 곡선에서 거의 회전하지 않는 문제가 발생하여 빵판을 떼어내고 AA배터리를 그 자리로 옮겨 부착함. 또한 회전을 너무 이른 시점에 하는 문제가 생김. (기준 사진을 직접 찍은 것이 아닌 제공된 것을 사용함) 차의 앞부분이 바퀴보다 너무 앞에 있는 것을 원인이라 생각하여 카메라를 뒤로 빼고 높이를 높임. 그 후 완주에 2회 성공함. [코드 구조 및 설명] 저장한 사진을 기준으로 파란 선에 해당하는 RGB 값을 인식함. 카메라에 비친 파란색 선을 벗어나면 후진, 중앙이면 직진, 위치에 따라서 좌/우회전을 함. 보드에는 모터를 돌리는 프로그램을 넣고, esp32를 통해 영상을 라이브로 보면서 컴퓨터와의 실시간 통신으로 아두이노 보드를 제어함. [성능 테스트 및 평가] 완주에 2회 성공하였으나 차 길이가 너무 길고 무게가 뒤에 있어서 회전이 크게 제한되어 완주까지 너무 오래 걸림. [결과 및 결론] 처음 설계할 때 차가 빨리 이동하고 적당히 회전하기 위한 구조를 염두해 두어야 한다.