RC카 제작 소감문
활동 보고서
안*민
2024-06-28
코드에디터
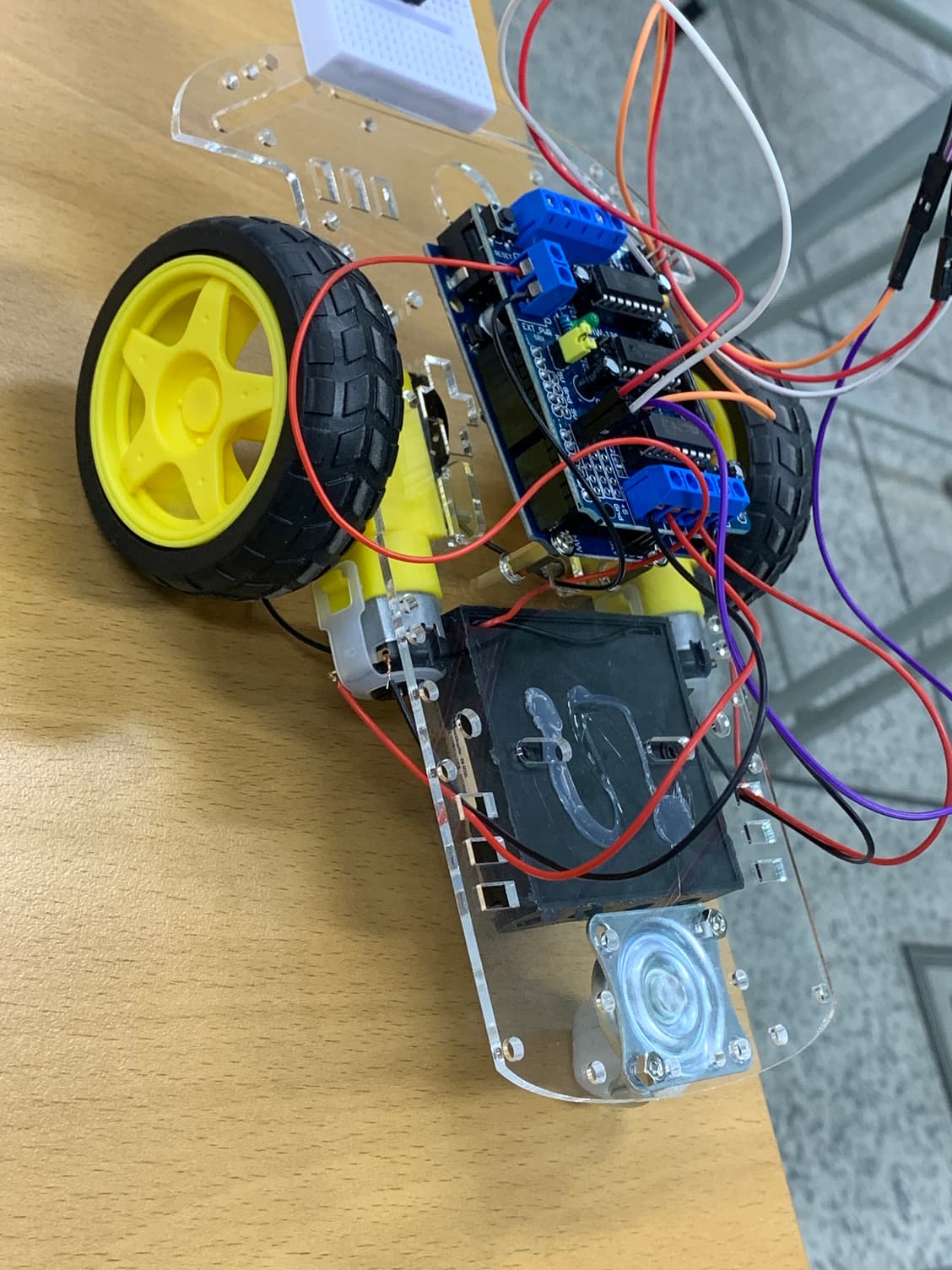

아두이노를 활용한 자율주행 RC카 제작 프로젝트는 나에게 기술적 도전과 창의적 성취감을 모두 제공한 매우 의미 있는 경험이었다. 이 프로젝트는 아두이노와 다양한 센서, 모터, 그리고 프로그래밍 기술을 결합하여 작은 RC카를 자율적으로 주행하게 하는 것이 목표였다. 프로젝트를 통해 얻은 지식과 경험은 나의 기술적 역량을 크게 향상시켰으며, 문제 해결 능력과 창의적 사고를 배양하는 데 큰 도움이 되었다. 아두이노를 처음 접했을 때는 생소하고 어려웠지만, 반복적인 학습과 실습을 통해 점차 익숙해질 수 있었다. 기본적인 LED 점멸 실습에서부터 시작하여 서서히 더 복잡한 프로젝트로 넘어가면서, 나는 아두이노의 강력함과 유연성을 깨닫게 되었다. 자율주행 RC카의 하드웨어 구성은 여러 가지 요소로 이루어져 있다. 먼저, RC카의 기본 프레임과 모터를 준비했다. 모터 드라이버와 아두이노 보드를 연결하여 모터를 제어할 수 있게 하였고, 초음파 센서를 사용하여 장애물을 감지하도록 설계했다. 또한, 배터리와 전원 관리 모듈을 통해 안정적인 전원을 공급하였다. 각 부품을 연결하고 조립하는 과정은 많은 주의와 정밀함이 요구되었으며, 특히 배선 작업에서 실수가 없도록 신경을 썼다. 하드웨어 구성 후, 가장 중요한 소프트웨어 개발 단계에 돌입했다. 아두이노 IDE를 사용하여 C++ 기반의 코드를 작성하였고, 각 센서와 모터의 동작을 세밀하게 조정하였다. 초음파 센서를 이용한 거리 측정 알고리즘을 구현하여 RC카가 장애물을 인식하고 회피할 수 있도록 하였다. 또한, PID 제어 알고리즘을 도입하여 주행의 안정성을 높였다. 소프트웨어 개발 과정에서 가장 어려웠던 점은 센서 데이터의 노이즈를 처리하고, 정확한 제어 신호를 생성하는 것이었다. 개발이 완료된 후, RC카를 테스트하는 단계로 넘어갔다. 다양한 환경에서 RC카를 주행시키며 성능을 평가하였고, 예상치 못한 문제들이 발생했다. 예를 들어, 센서의 감지 범위가 불충분하거나, 모터의 출력이 부족한 경우가 있었다. 이러한 문제들을 하나씩 해결하기 위해 소프트웨어와 하드웨어를 지속적으로 개선하였다. 특히, 센서의 위치를 조정하거나, 모터 드라이버의 설정을 변경하는 등의 작업을 통해 최적의 성능을 달성할 수 있었다. 최종적으로, 나는 안정적으로 자율주행이 가능한 RC카를 완성할 수 있었다. RC카는 주어진 경로를 따라 주행하며, 장애물을 인식하고 회피하는 데 성공하였다. 이 과정에서 얻은 성취감은 이루 말할 수 없었고, 내가 학습하고 적용한 기술들이 실제로 작동하는 것을 보며 큰 만족감을 느꼈다. 또한, 이 프로젝트를 통해 아두이노와 센서, 모터 제어에 대한 깊은 이해를 얻게 되었고, 이러한 경험은 앞으로의 기술적 도전에 큰 자산이 될 것이다. 아두이노를 활용한 자율주행 RC카 제작 프로젝트는 나에게 많은 것을 가르쳐 준 소중한 경험이었다. 하드웨어와 소프트웨어의 통합, 문제 해결 과정에서의 끈기와 창의적 사고 등은 모두 나의 기술적 성장을 이끄는 원동력이 되었다. 앞으로도 이러한 프로젝트를 통해 더 많은 것을 배우고, 새로운 도전에 도전하고 싶다. 이 경험을 통해 얻은 지식과 자신감은 나의 미래에 큰 밑거름이 될 것이다.
