"핸드 비전" 프로젝트 보고서(박도연)
활동 보고서
박*연
2025-08-20
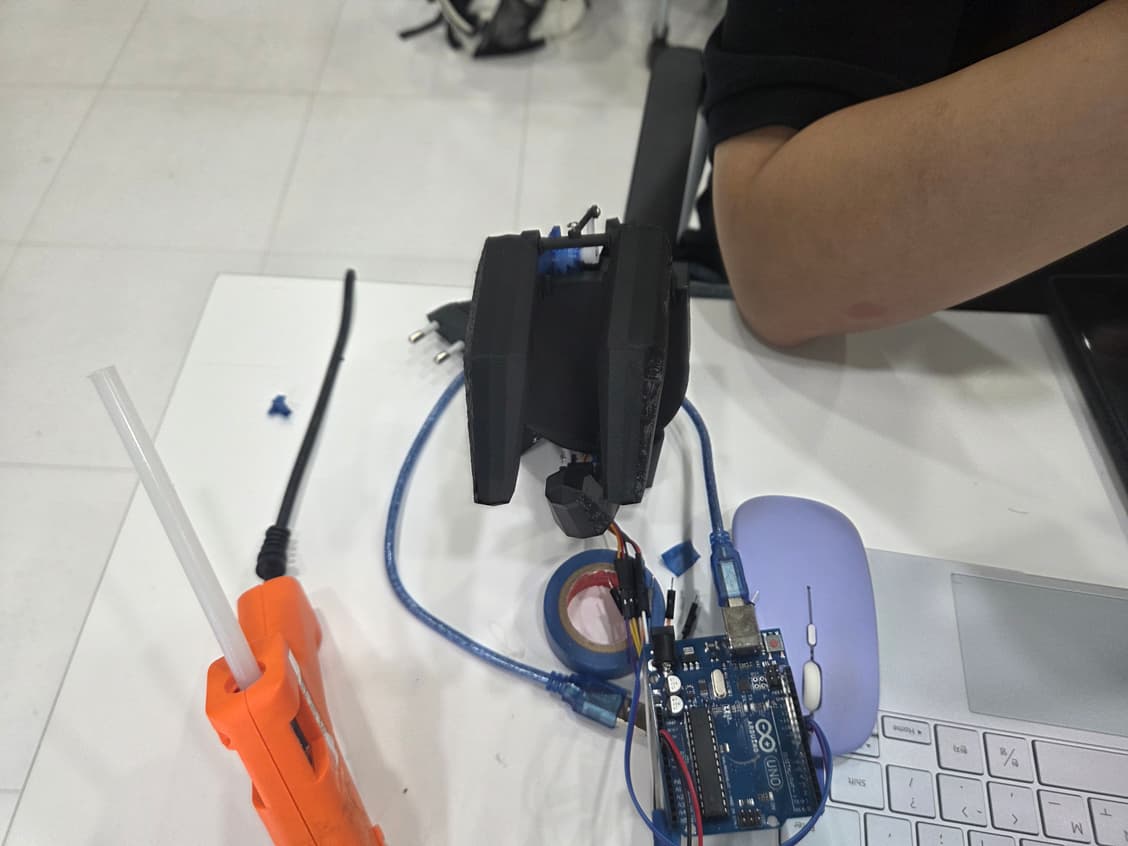


서론 1.1 연구 배경 및 목적 시작점: 로봇 손(의수) 활용 대상을 약자(노인·장애인)이 아닌 비장애인을 대상으로 설계 최종점: 우주비행사의 국제우주정거장(ISS) 외부 유지보수 안전을 위한 로봇 손(의수) 개발 1.2 개발 필요성 및 기대효과 개발 필요성: 우주비행사의 국제우주정거장(ISS) 외부 유지보수 위험 안전위해 개발. 기대효과: 우주복 시스템 고장, 우주방사선 피복, 우주 잔해 충돌, 생명유지계 문제, 인체공학적 부담 등등 여러 위험성 해소. 우주비행사가 국제우주정거장 외부에 나가는건 최후의 선택될 것이다. 1.3 보고서 구성 개요(주요기능, 작동 매커니즘, 제작과정, 시제품 시연 또는 영상) 주요 기능: 1) 카메라 앞의 손의 움직임 따라하기 구현 방법: 1) 파이썬 openCV 이미지 트래킹 2) 3D 프린터 손 모양 출력물 3) DC 모터 2개/ 서보모터 6개
