16기 배호준 (p16039)
과제
배*준
2025-03-22
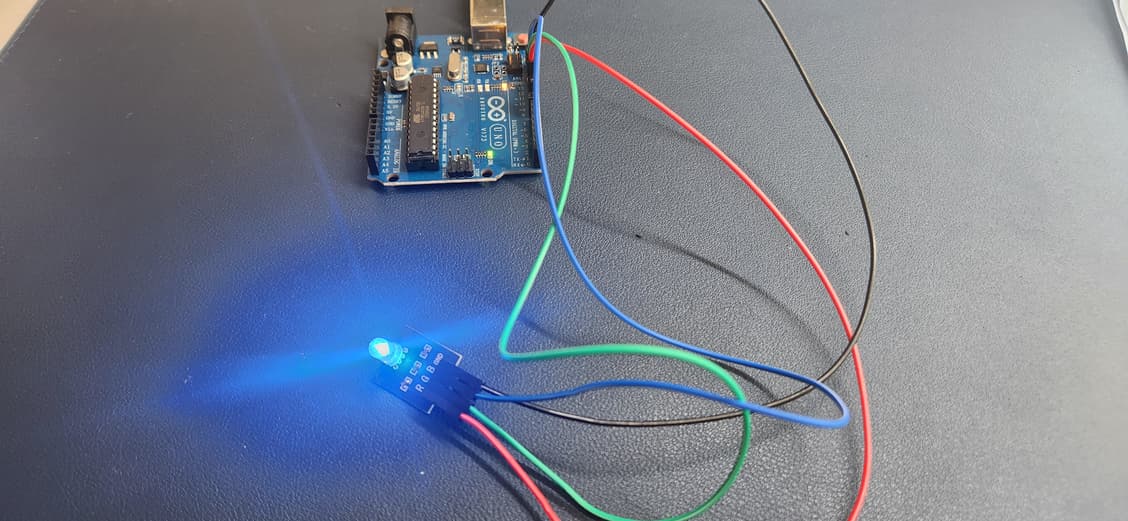
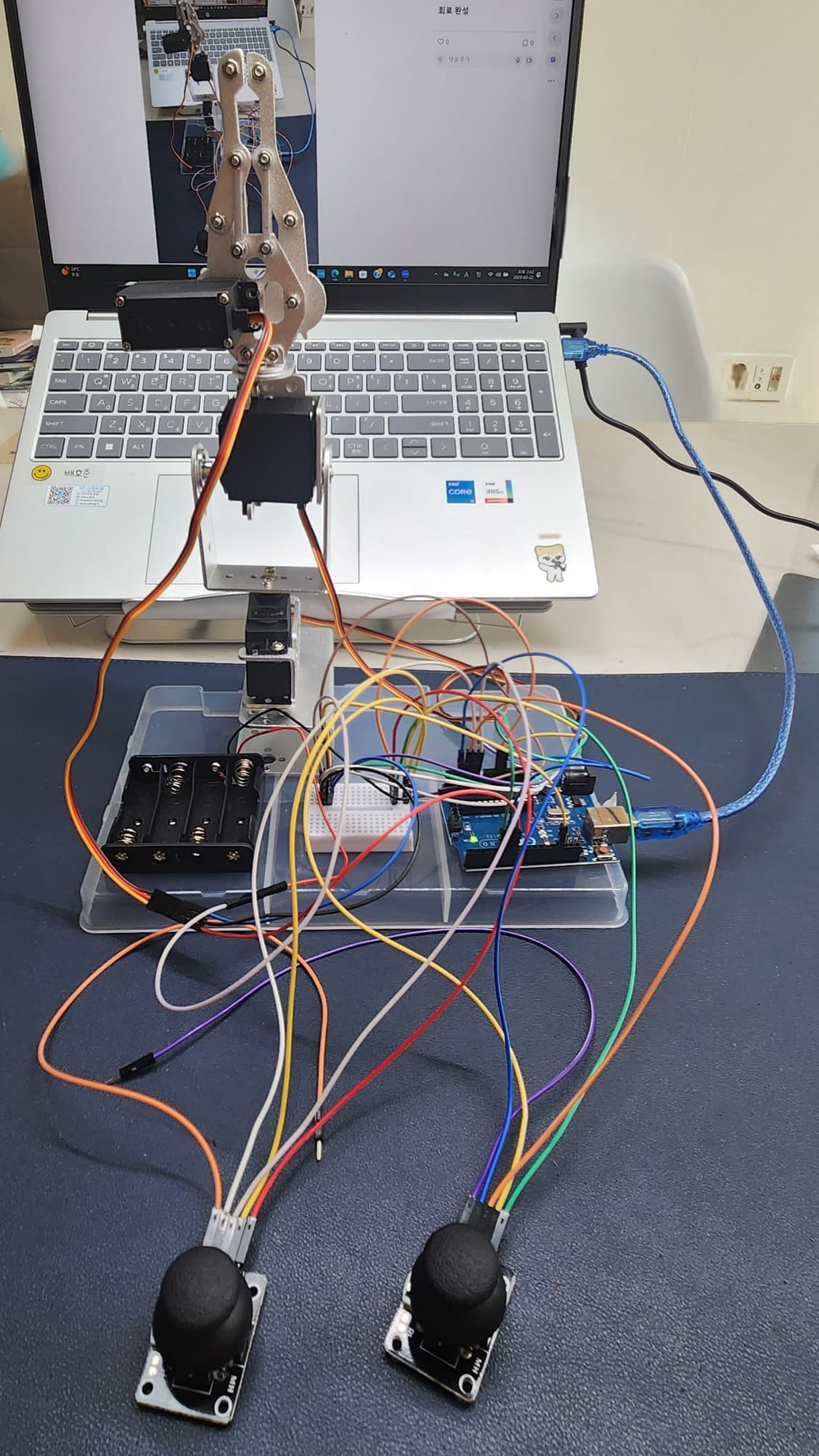
제작 동기 : 앞으로 다가올 로봇 시대를 직접 체험해 볼 수 있는 좋은 기회라 제작해보게 되었다. 사용한 기술 : 브레드보드, 아두이노, 서보모터, 조이스틱 등 주요 기능 : 2개의 조이스틱으로 3개의 모터를 제어하여 좌우상하 회전과 집게 오므리기, 벌리기를 통해 물체를 집어 들고 운반할 수 있다. 프로젝트 제작 과정에서 느낀 점 : 키트에 약간의 불량이 있어서 RGB LED 버튼의 빨간색 불이 들어오지 않은 것, 오랜 시간 제작했는데 3번 나사의 수량이 부족해 다른 나사로 대체해서 그런지 작동이 원할하게 되지 않고 작동 반경이 좁았던 것이 아쉬웠다. 다음에는 강사 선생님이 말씀하신 것처럼 오프라인으로 이 수업을 하면 좋겠다. P.S. 동영상 유튜브 업로드에 오류가 있어 아쉽지만 사진으로 첨부합니다.
수업 내용
<피지컬 컴퓨팅 사례> 얼굴 인식 도어락 : 얼굴 인식 도어락은 사람의 얼굴을 감지해서 특정 인물이 들어올 때만 문이 열리게 한다.
미션수행 1
코드에디터
언어 선택
입력
실행 결과
이 곳에 결과가 표시됩니다.

미션수행 2
코드에디터
언어 선택
입력
실행 결과
이 곳에 결과가 표시됩니다.
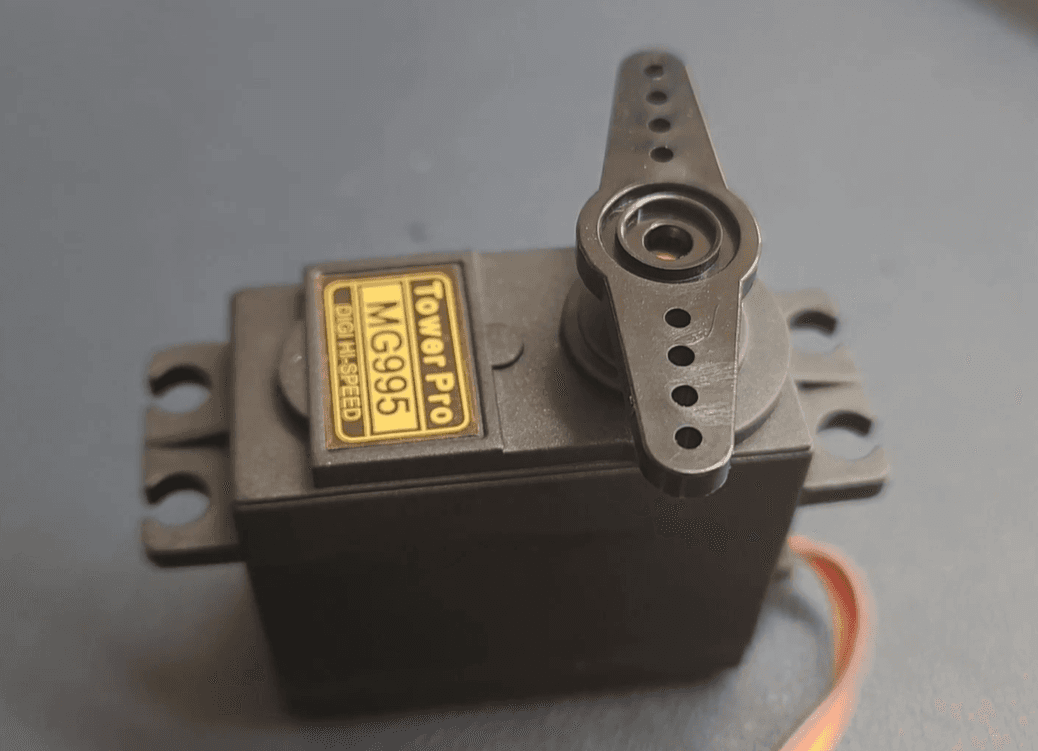
모터
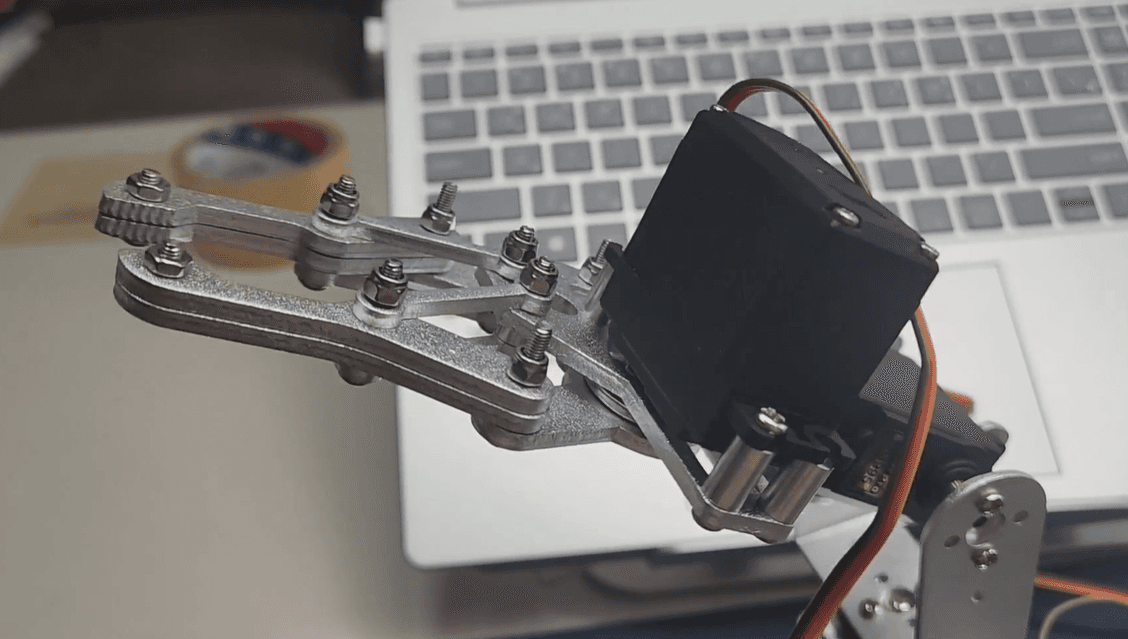
로봇 팔 제작 과정
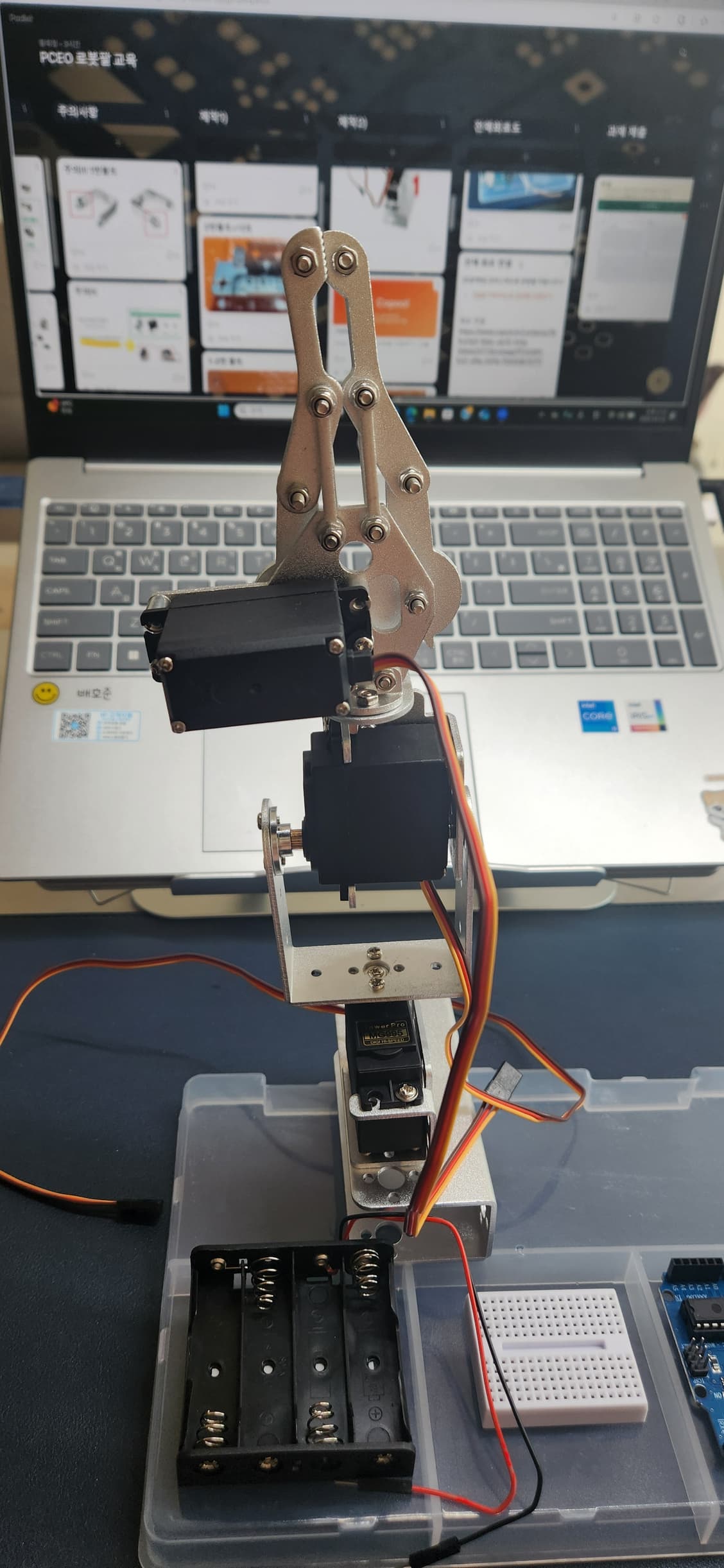
로봇 팔 작동 모습
코드에디터
언어 선택
입력
실행 결과
이 곳에 결과가 표시됩니다.
