핸드비전-모션캡쳐 로봇의수 김현수 활동보고서
활동 보고서
김*수
2025-08-20
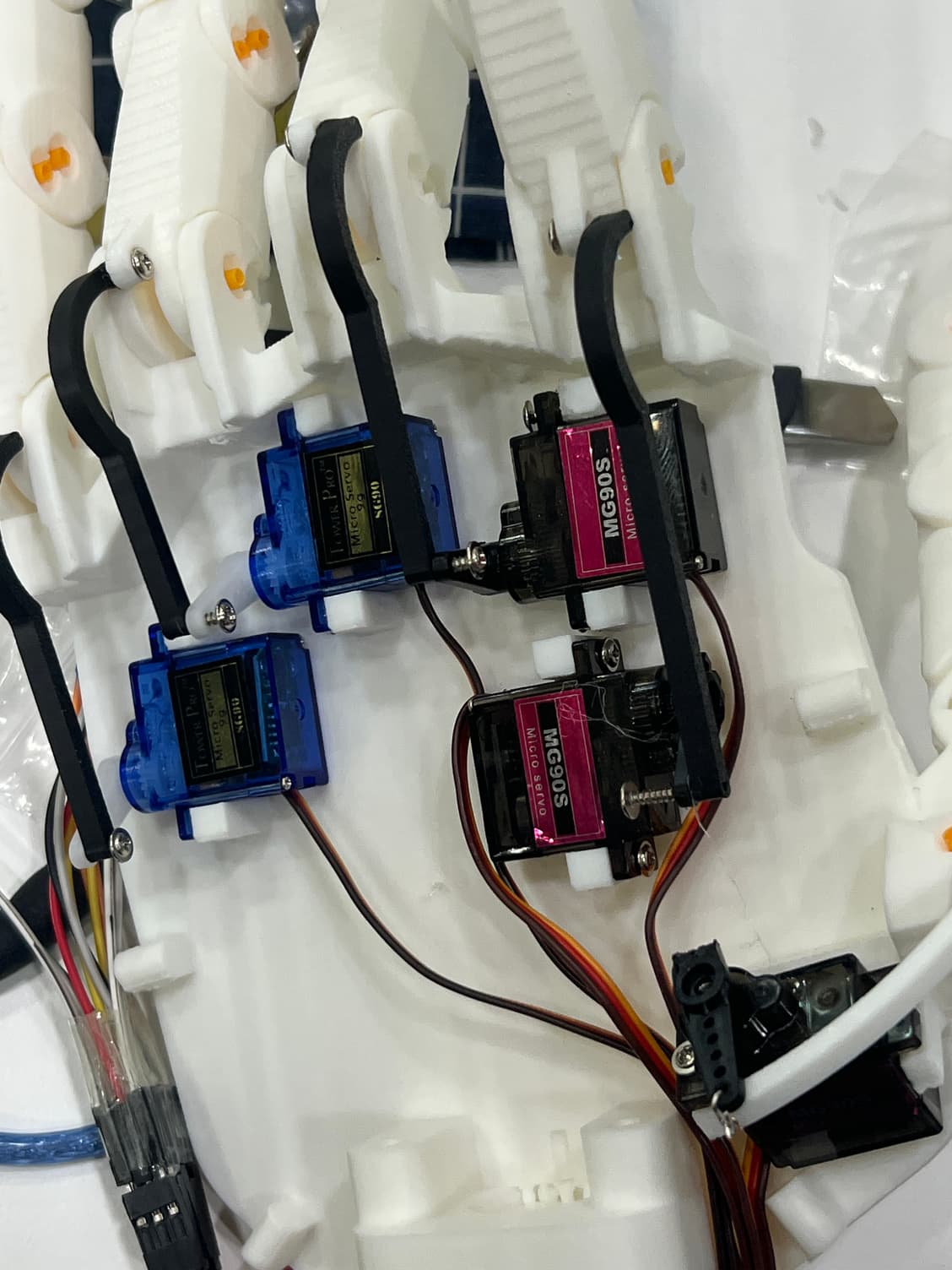
opencv를 통한 마커리스 모션인식으로 손의 관절을 인식해서 아두이노 serial 통신으로 로봇의수의 손가락를 제어한다. 해서 모션캡처 마커를 붙이지 않고 또, 센서가 달린 장갑을 끼지 않고도 정밀한 제어가 가능하다는 장점이 있다. 또 정밀 조작을 위해서 손목 관절 부분에는 자이로 센서를 부착하여 손목 평행유지 기능(a.k.a 짐벌)이 있다. 플랫폼에 2축바퀴를 달아 멀리 떨어져 있는 환경에서도 동작하도록 설계되어있다.