로봇 의수ㆍ의족 제작 결과 보고서_구영모
활동 보고서
구*모
2024-08-23
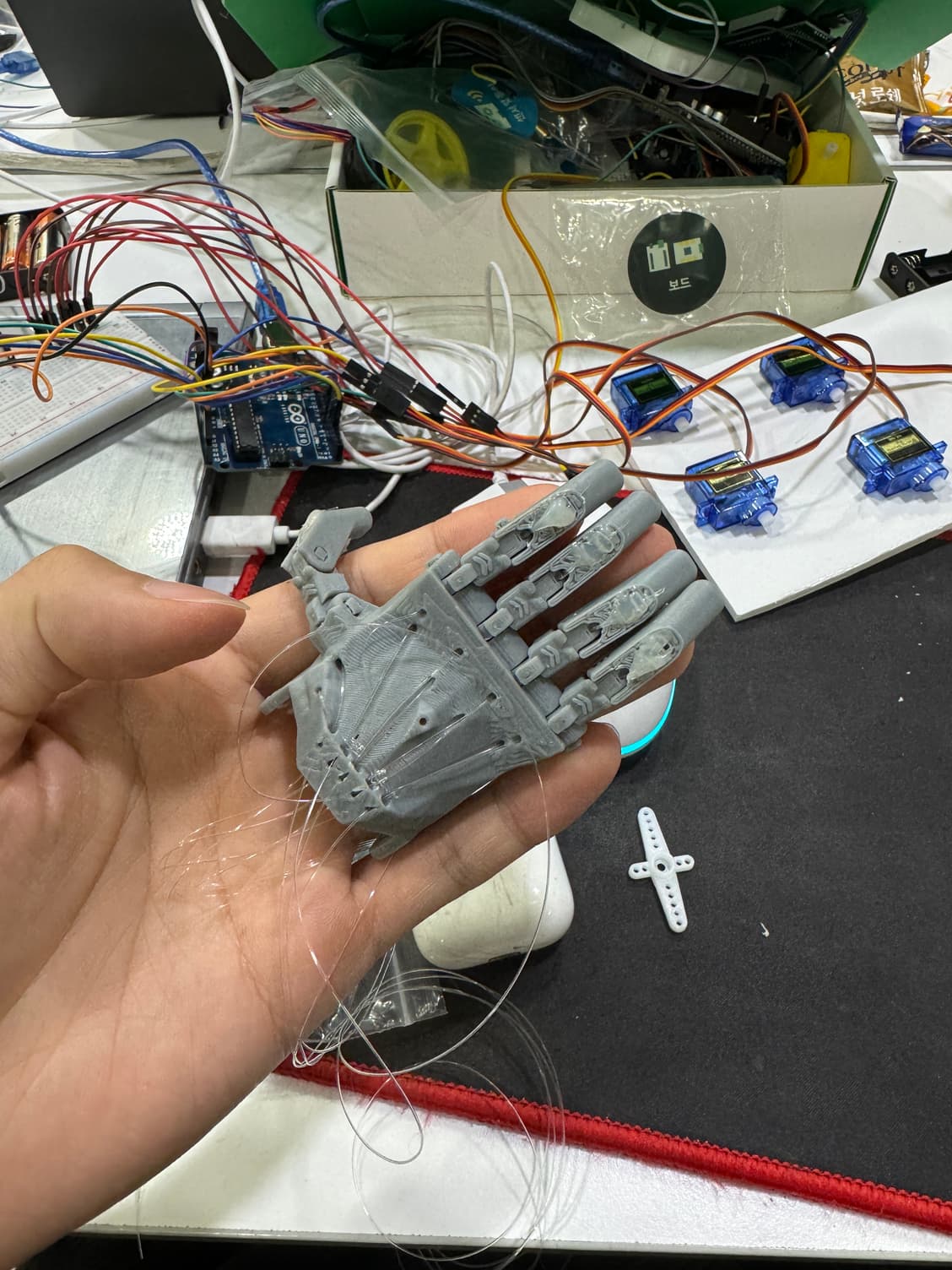
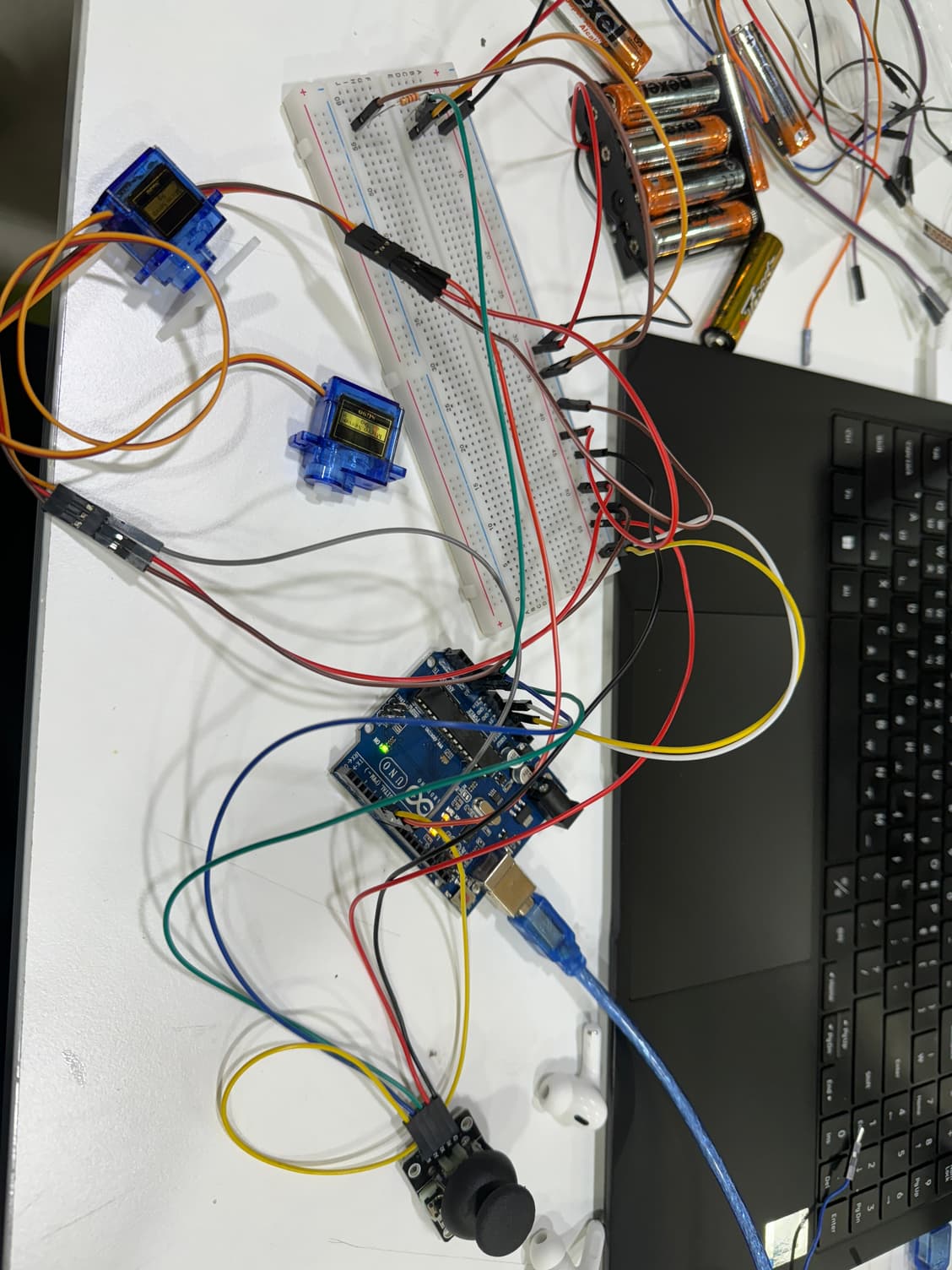
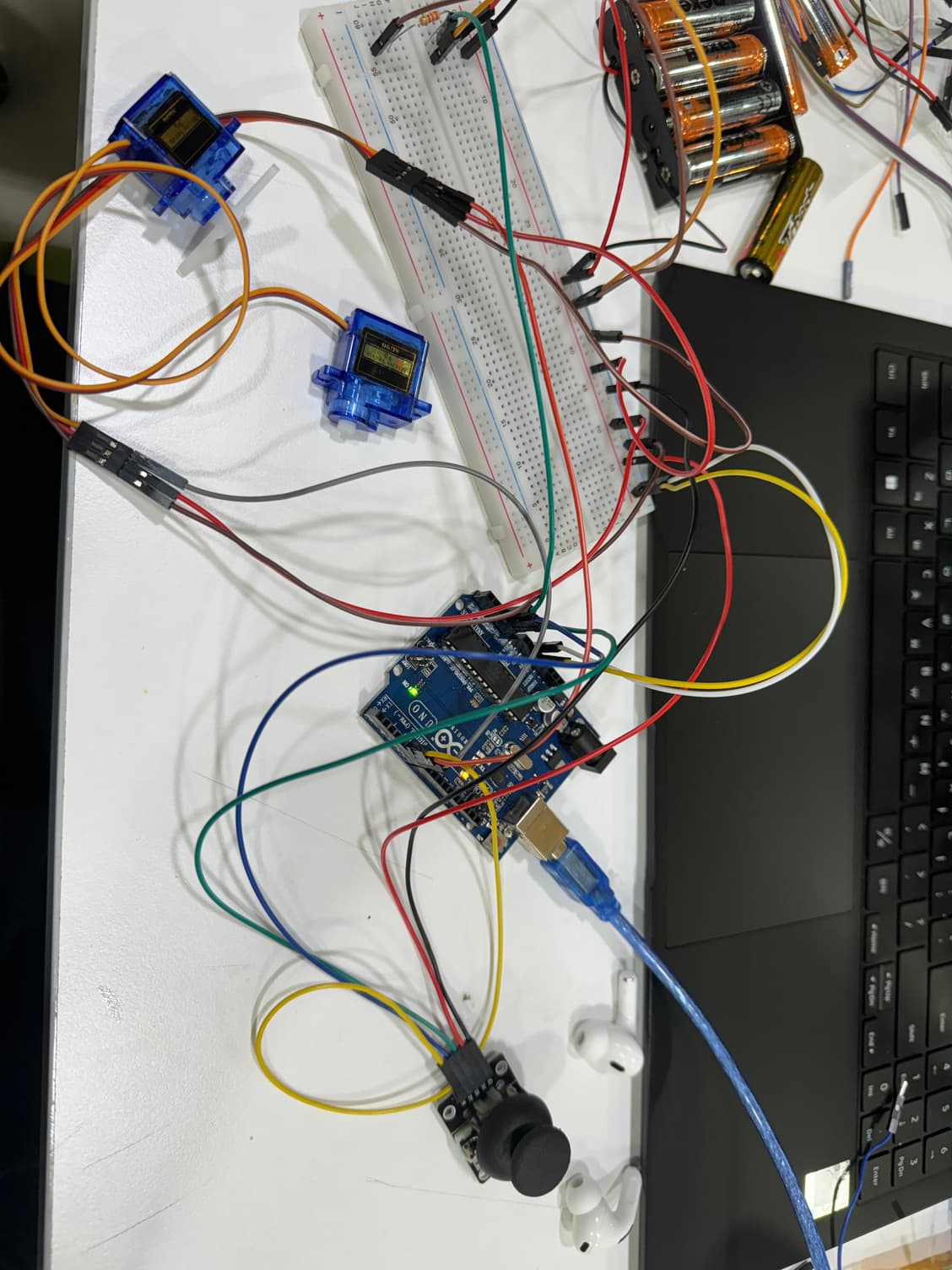
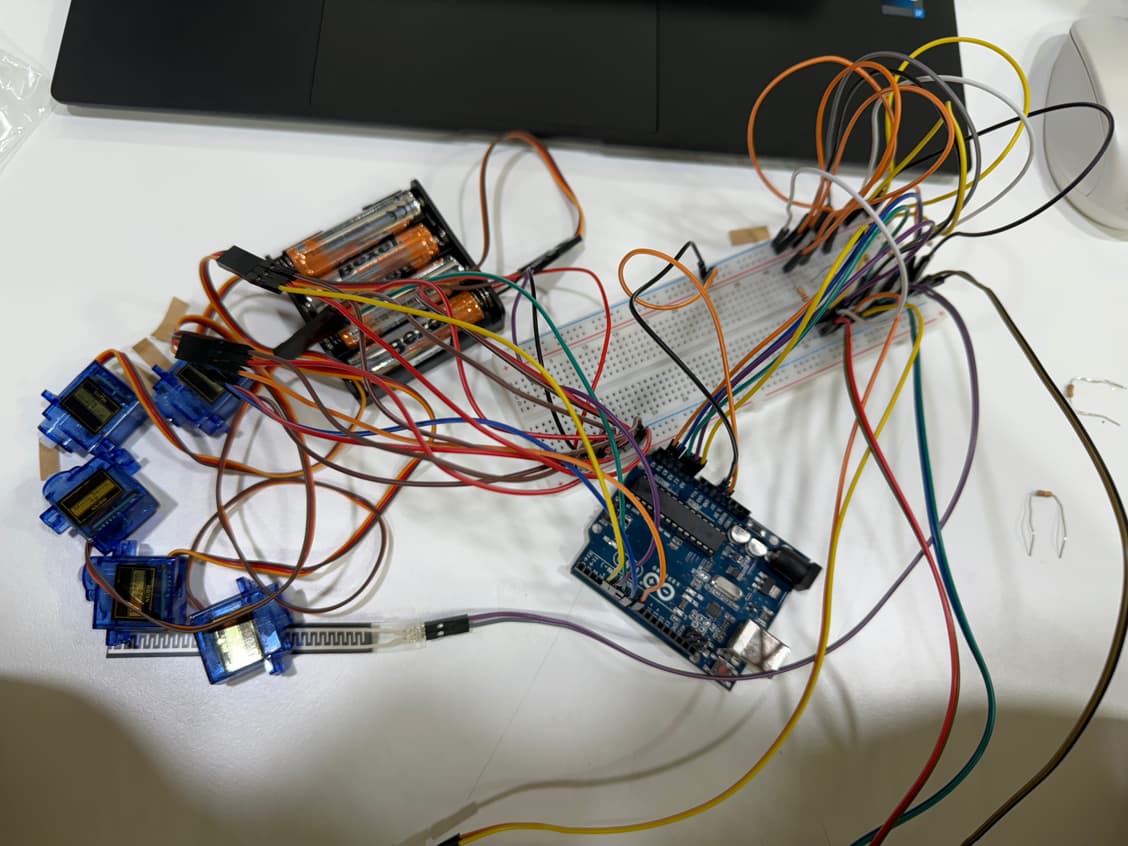
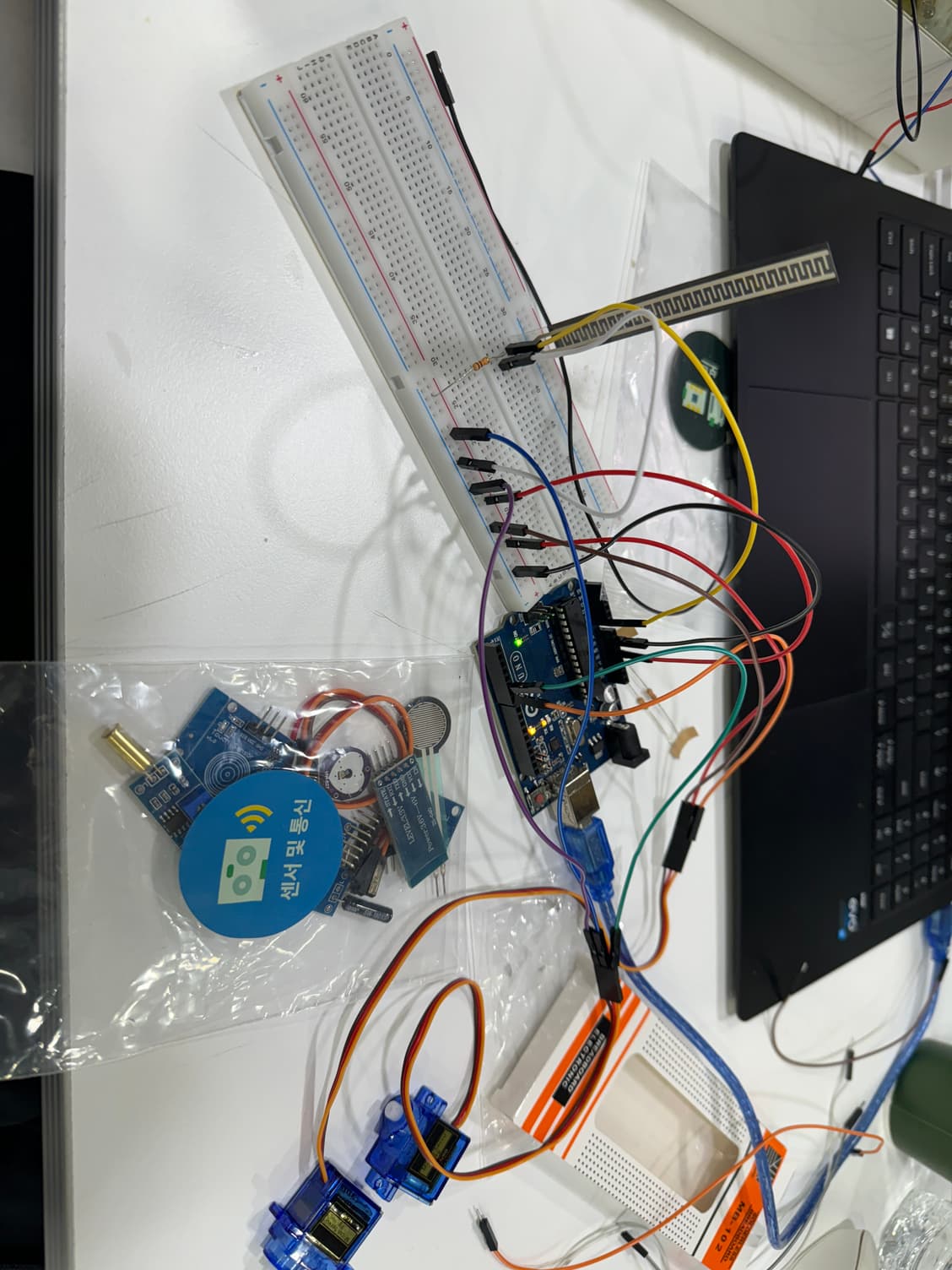
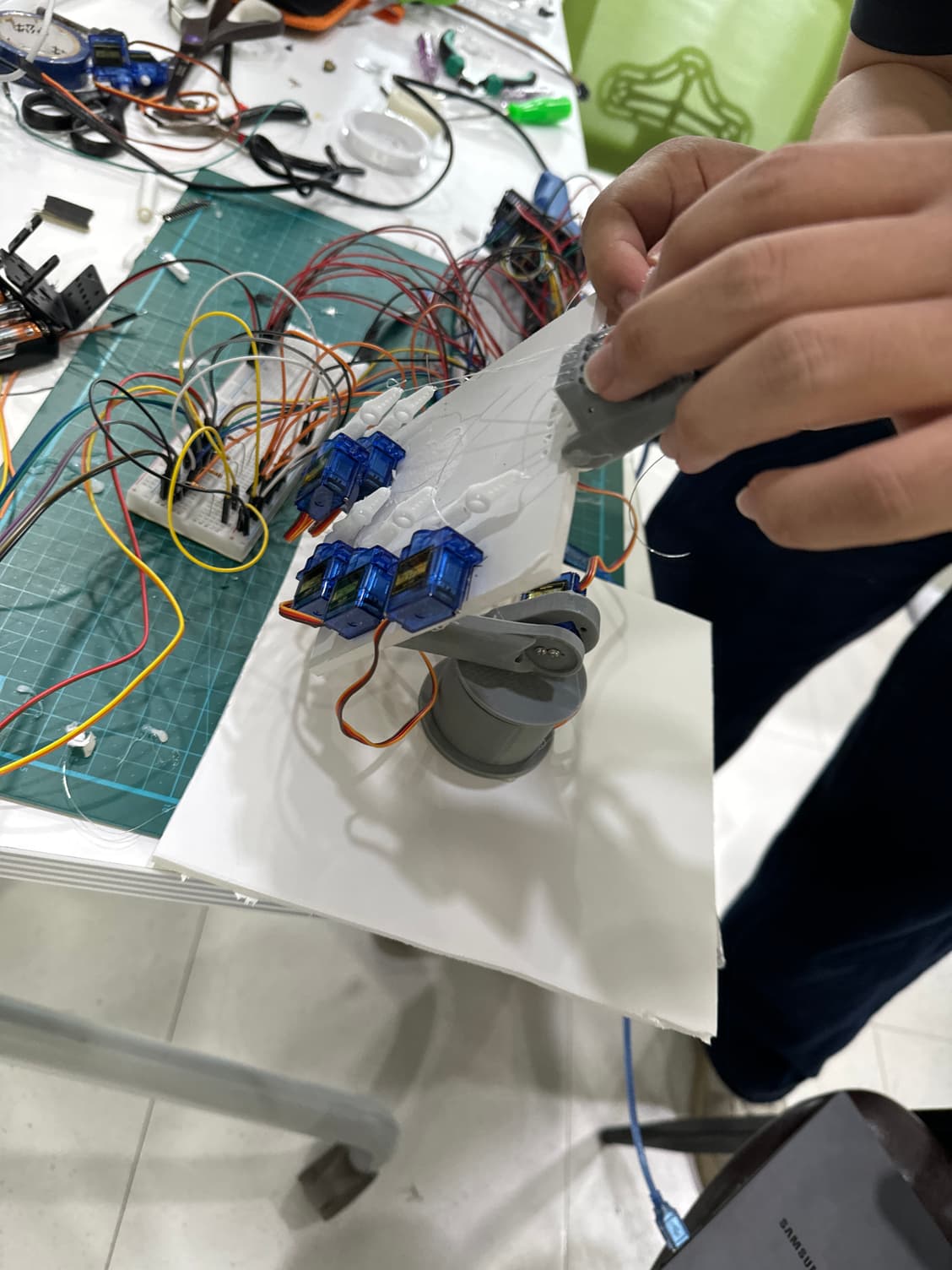
📌 작품의 기능과 설계 및 계획을 작성해주세요. 크게 손 부분과 팔 부분으로 나눌 수 있습니다. 1) 손 부분 : 손가락 움직임을 플렉스 센서가 감지하여 작은 의수가 손의 움직임을 그대로 따라할 수 있게 하였습니다. 2) 팔 부분 : 조이스틱을 이용하여 팔의 방향을 상하좌우로 이동할 수 있도록 하였고, 손목의 움직임을 플렉스 센서가 감지하여 모델에 그대로 표현할 수 있게 하였다. 📌 어떠한 어려운 점이 있었는지와 해결 방법에 대해 작성해주세요. 일반 손보다 사이즈가 작다보니 부품 설계에 어려움이 있었고, 3D 모델을 뽑는데 걸리는 시간이 있어 팔과, 손을 각각 만들고 마지막 날에 붙이는 작업을 하였는데 팔의 관절이 손 회로의 무게를 버티지 못하여 동시에 동작은 힘들었다. 📌 결과 및 결론에 대해 작성해주세요. 의수를 사이즈를 작게 가져감으로서 의료 부분에 활용이 가능할 것 같다. 실제로 다빈치라는 수술용 의수가 있다. 📌 코드, 작동 영상, 이미지 등 함께 첨부해주세요.
코드에디터
언어 선택
입력
실행 결과
이 곳에 결과가 표시됩니다.
코드에디터
언어 선택
입력
실행 결과
이 곳에 결과가 표시됩니다.