자율주행 RC카 제작 결과 보고서 - 이민재
활동 보고서
이*재
2024-07-26
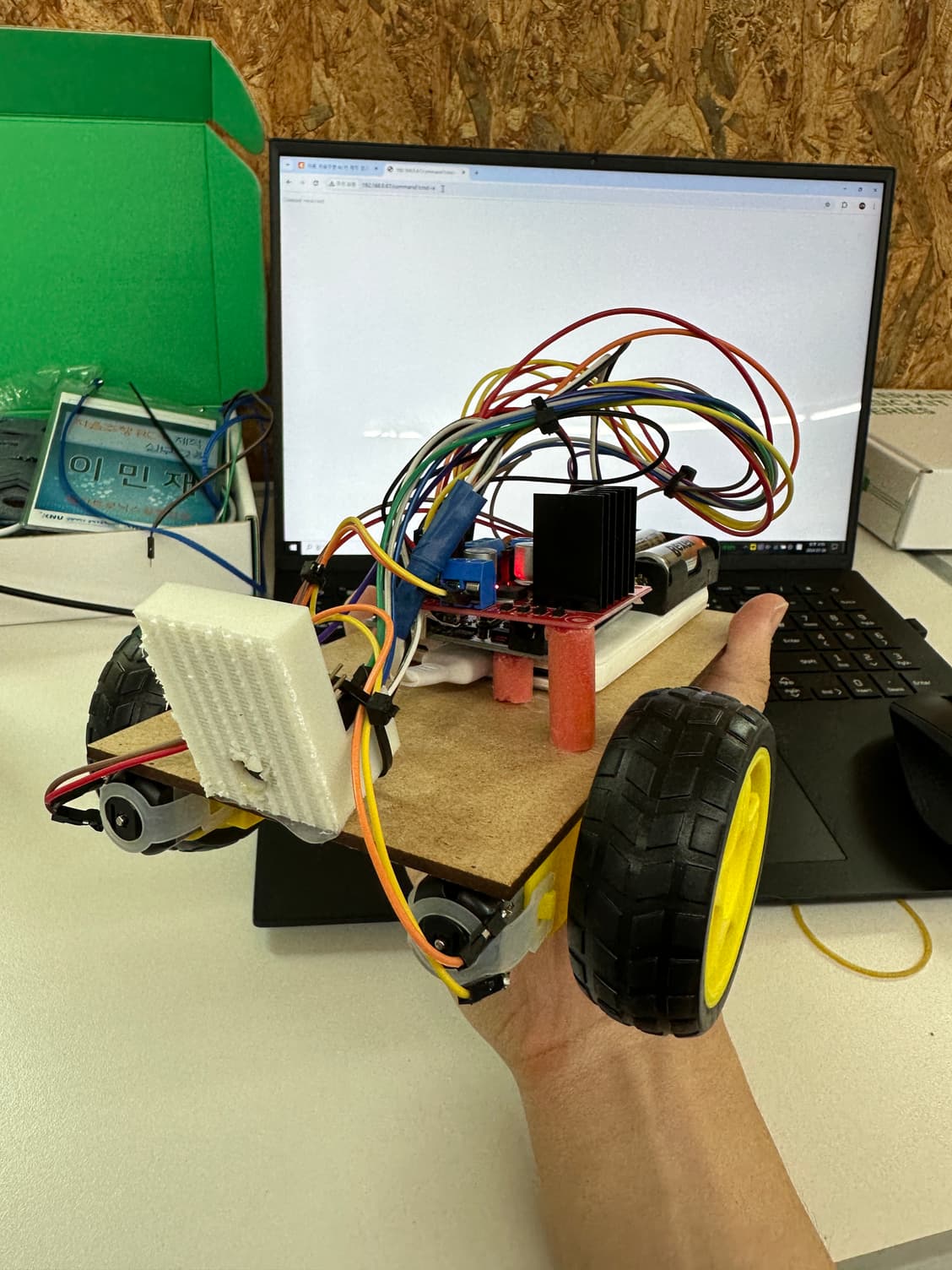
[프로젝트 개요] 아두이노를 이용하여 소형 원격 제어 자동차(RC카)를 자율적으로 주행할 수 있도록 설계, 제작, 테스트하는 것을 목표로 하였다. 이를 통해 자율주행의 기본 원리를 이해하였다. [설계 및 계획] 처음엔 4륜 구동 자동차를 계획하여 설계하였으나 전력이 부족하다는 강사님의 말을 듣고 전륜 구동 3륜 자동차를 설계했다. [제작 과정] 아두이노를 이용하여 기본적인 차량 움직임을 만들어냈고, 레이저 커팅을 이용해 차체 제작, 3D 프린팅을 이용하여 카메라 케이스를 제작하여 차량에 부착하였다. [코드 구조 및 설명] def go_backward(): urllib.request.urlopen('http://'+IP_ADDR+':80/command?cmd=d') time.sleep(0.07) def turn_left(): urllib.request.urlopen('http://'+IP_ADDR+':80/command?cmd=b') time.sleep(0.1) def turn_right(): urllib.request.urlopen('http://'+IP_ADDR+':80/command?cmd=c') time.sleep(0.1) def calibrate_left(): urllib.request.urlopen('http://'+IP_ADDR+':80/command?cmd=b') time.sleep(0.08) def calibrate_right(): urllib.request.urlopen('http://'+IP_ADDR+':80/command?cmd=c') time.sleep(0.08) def go_forward(): urllib.request.urlopen('http://'+IP_ADDR+':80/command?cmd=a') time.sleep(0.08) 가장 중요하게 생각한 코드는 바퀴가 움직이는 시간이라고 생각하여 이 코드들을 집중적으로 구성하였다. [성능 테스트 및 평가] 초반 테스트시 완주를 하였으나 계속 테스트를 진행할 수록 코너에서 뒤로 가는 불상사가 생겼다. [결과 및 결론] 이번 활동을 통하여 자율주행 에 대한 기초적인 지식을 얻었고, 아두이노와 3D프린팅을 더욱 더 활용할 수 있는 유익한 시간이었다.