이종원_자율주행 RC카 제작 결과 보고서
활동 보고서
이*원
2024-07-26
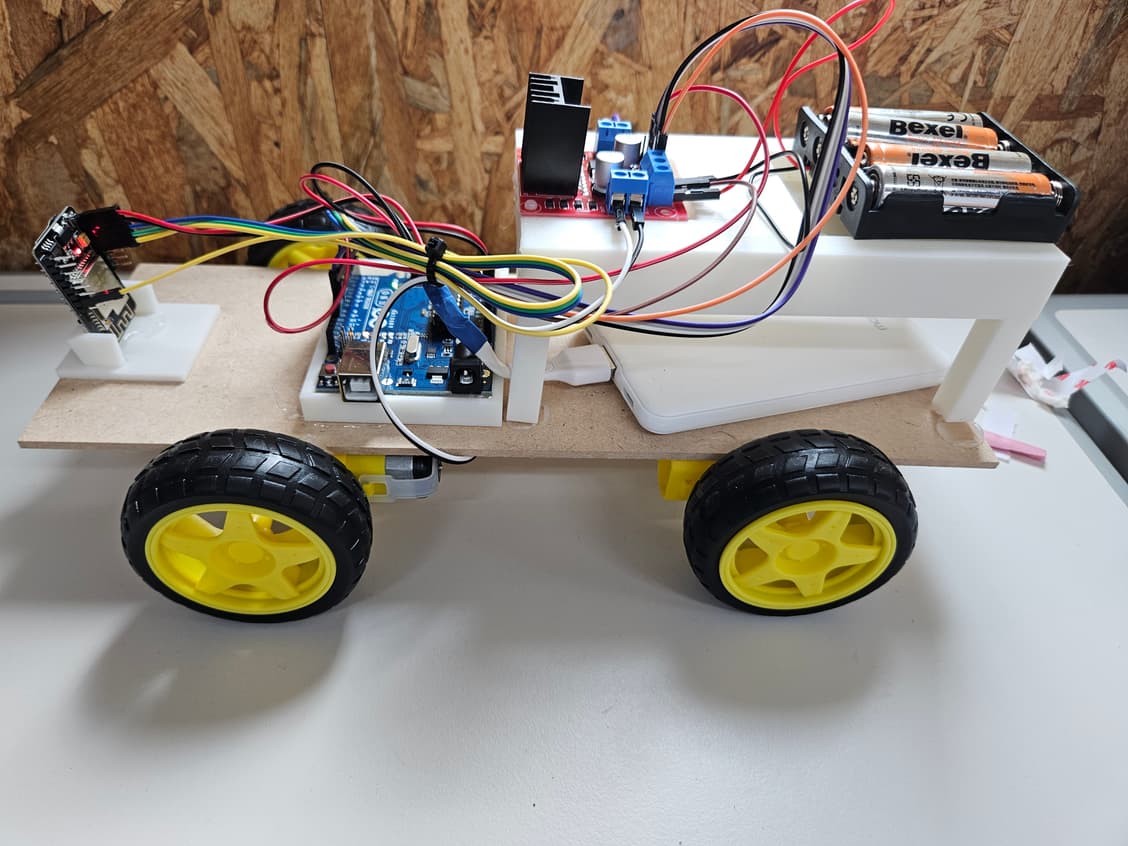
[프로젝트 개요] -이 프로젝트는 ESP32 CAM과 ESP32 CAM를 활용하여 트랙의 선을 따라가도록 코딩하여 자율주행 RC카를 제작하는 것이 목표이다. [설계 및 계획] -모터 드라이버에 전력을 주기 위한 AA배터리함과 ESP32 CAM과 아두이노에 전압을 주기 위해 보조 배터리를 사용한다. 배터리와 보드들을 고정하기 위해서 3D 프린터를 활용하여 구조물을 제작할 계획이다. [제작 과정] -나무 판에 모든 부품을 올릴 수 없기에 추가 판을 제작하여 AA배터리함과 모터 드라이버를 고정시켰다. 그 앞에 아두이노를 고정하여 보조배터리를 보관할 수 있는 공간을 만들었다. 이 공간을 활용한다면 보조배터리를 고정하지 않아도 주행에 영향을 주지 않을 뿐더러 쉽게 선을 연결할 수 있다. 마지막으로 가장 앞에 ESP32 CAM을 75도 기울여 고정할 수 있는 구조물을 만들어서 특정 각도의 사진만을 찍을 수 있도록 했다. [코드 구조 및 설명] -192.168.0.57:80/cam-hi.jpg에서 불러온 사진을 상하반전 후 필요한 부분만을 자른다. 다음 원근 변환하여 트랙의 라인을 확대하여 필터링을 거쳐서 라인의 색만을 인식하게 만든다. 그리고 인식한 라인을 따라 가도록 주행하게 한다. [성능 테스트 및 평가] -트랙 처음부터 끝까지 완주는 하였지만 그 과정 속에서 시간이 너무 오래 걸렸다. 직진 코스에서는 빠르게 지나가지만 코너를 만나게 되면 왼쪽으로만 꺾이거나 선을 인식하지 못해서 트랙을 탈주하는 일이 많았다. [결과 및 결론] -5번 시도해야 한 번 RC카지만 자율주행하는 RC카를 직접 제작해보는 것은 처음 경험해보는 것이라 어려운 과정도 있었지만 그래도 뜻 깊은 경험이었다.