강원대_기계메카_이한영_IN the friend
활동 보고서
이*영
2025-08-21
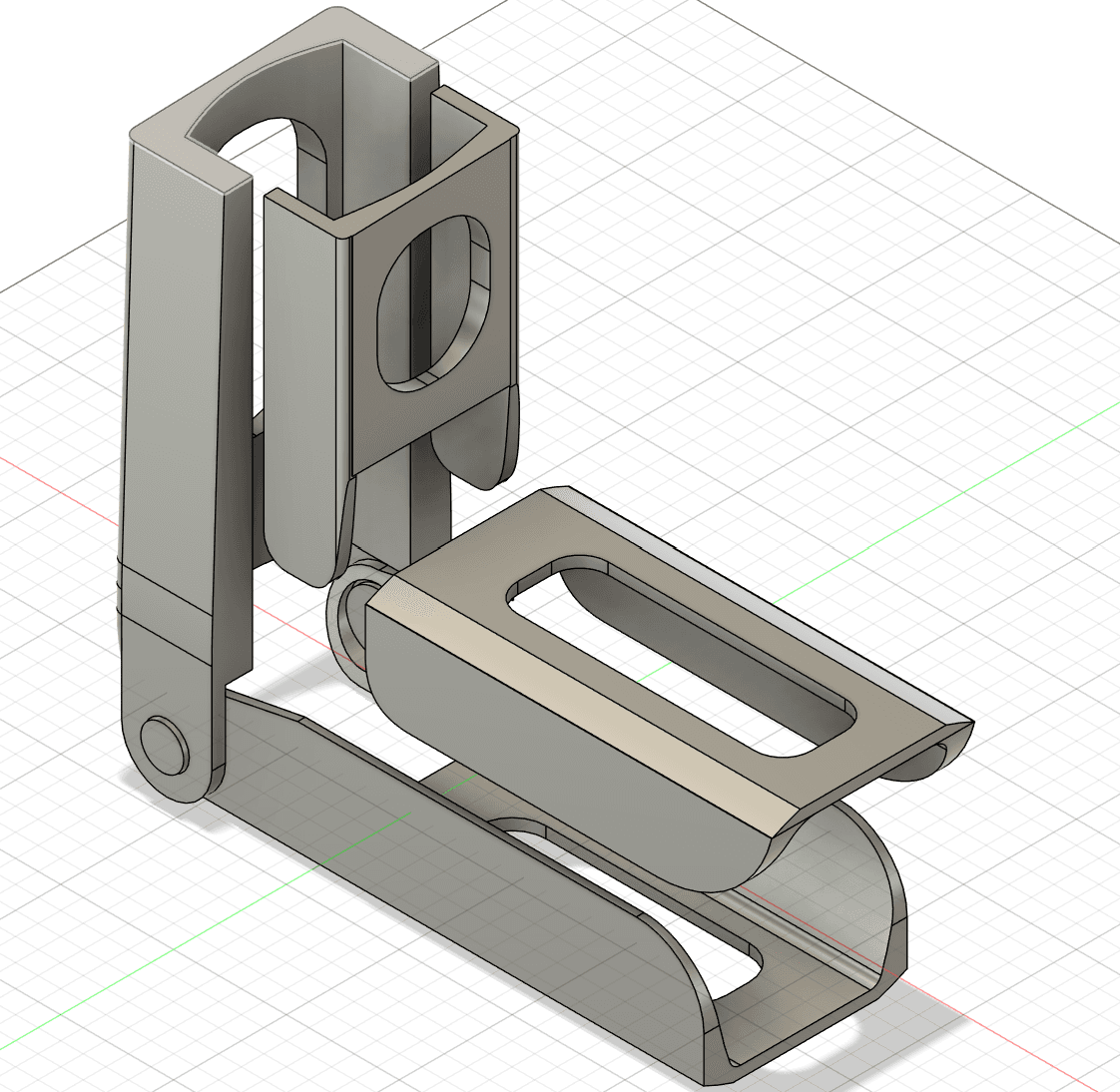
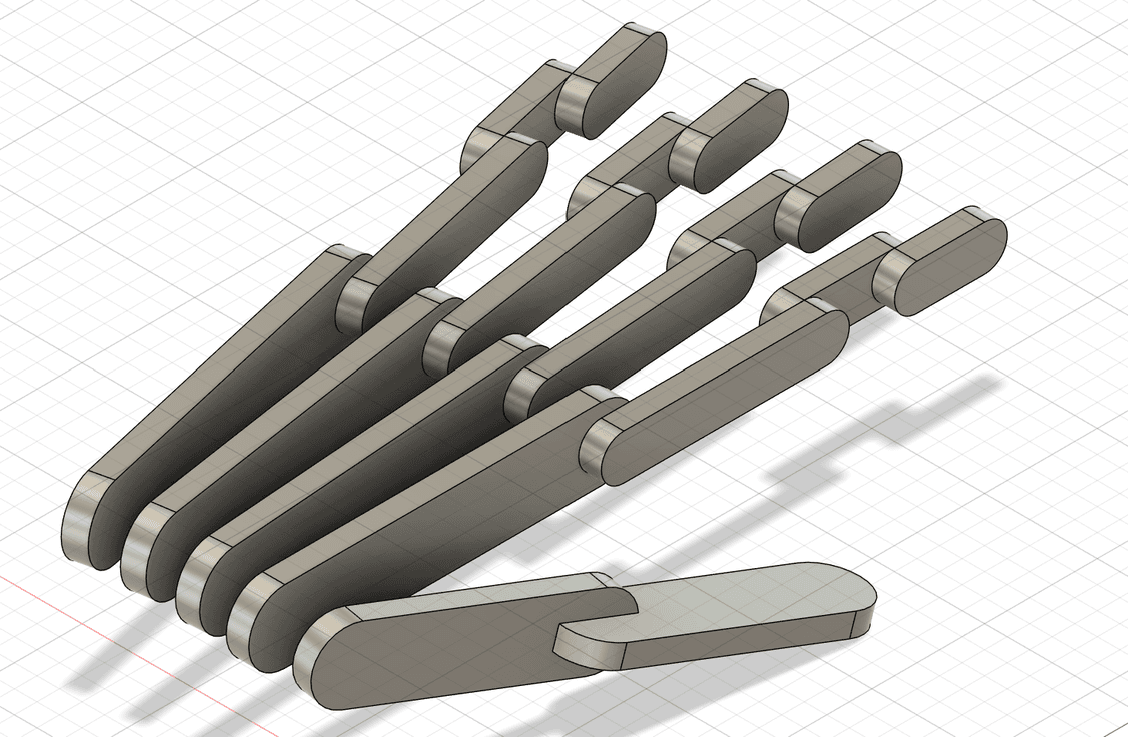

팀 구성 이후 초기 구상은 손을 움직이기 어려운 어려운 사람을 대상으로 하는 손을 직접 잡고 움직여주는 여러 센서가 포함된 로봇을 구상하였으나 시간 관리에서의 착오로 기한내 진행이 어려워지자 기존의 계획을 수정하여 로봇 손을 제작하기로 하였다. 기존의 계획을 수정하면서 프로젝트를 다시 시작하기에 시간 빠듯하였다. 시간이 부족한 관계로 수업자료로 제공 받은 로봇 손 디자인을 사용하였다. 초기 구상 이전에 로봇 손의 도면을 간단히 작성하였으나 마무리 하지는 않았다. 초기 구상에서의 사람의 팔을 감싸는 부분의 도면을 작성하였다. 이후에 센서 작동 테스트와 코드 수정 작업에 참여하였다. 로봇 손 출력을 담당하였다. 장갑의 센서 배치를 보조하였다. 교육 수강 이후 온도 감지 센서, 압력 센서 등을 의수에 넓게 분포시켜서 실제 손처럼 감각을 느낄 수 있는 의수, 손이 움직이는 범위 만큼 가동이 가능한 의수, 울버린 의수(의수에서 발톱나옴) 등 기회가 된다면 여러 의수 제작을 하고자한다.
코드에디터
언어 선택
입력
실행 결과
이 곳에 결과가 표시됩니다.
