김윤호_결과보고서
활동 보고서
김*호
2024-08-02
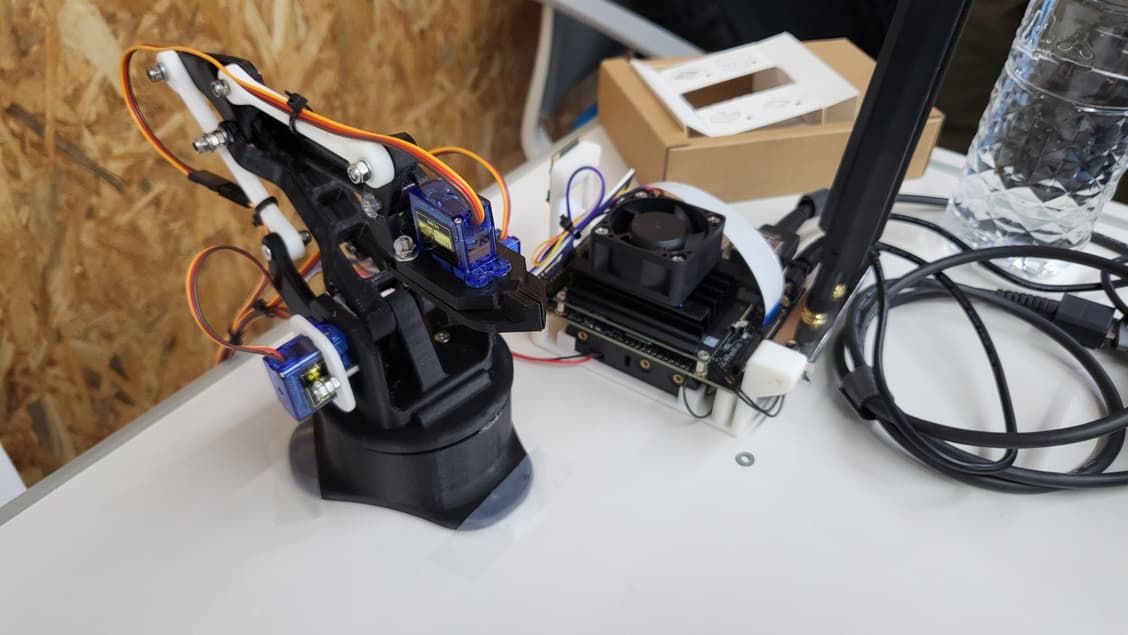
사진, 코드, 영상 등 다양한 블록을 추가해 보고서 작성을 완료해주세요. [프로그램 참가 동기, 소감] 인공지능, 이미지 인식을 이용한 하나의 제품을 실습하기 위해선 그래픽카드가 탑재된 젯슨나노가 필요하다. 젯슨나노는 아두이노나 라즈베리파이에 비해 가격이 비싸고 설정이 어렵기 때문에 학생이 스스로 실습하기 부담된다. 이번 젯슨나노 교육 덕분에 여러 이유로 시도하지 못했던 젯슨나노 실습을 진행할 수 있었다. [새롭게 알게 된 점, 느낀점] 젯슨나노에 OS를 설치하고 파이썬을 이용하여 제작할 때 티쳐블머신과 파이썬의 라이브러리가 충돌하여 정상적으로 작동하지 않음을 배웠다. 만약 이 사실을 모르고 스스로 혼자 실습했다면 이 사실을 모르고 많은 시간을 소모했을것이다. 젯슨나노를 미리 조사하여 알아차리기 어려운 오류들을 미리 해결해주신 강사님들께 감사하다. [팀 프로젝트에서 맡은 역할 및 프로젝트 소개] 이번 교육에서 팀원들과 사람의 손을 따라 움직이는 로봇팔과 그래퍼를 제작했다. 티쳐블 머신에서 손의 관절을 인식하는 기능을 주로 사용했다. 손의 관절 포인트 중 손목의 위치 좌표를 추출하고 좌표에 따라 로봇팔이 같은 비율로 움직인다. 그리고 손가락 관절을 통해 그래퍼를 제어했다. 손을 움켜쥐면 그래퍼가 닫히며 물건을 집고 손을 펴면 물건을 놓는다. 이를 이용하여 특정 상자 위에 있는 물건을 잡아서 다른 상자에 옮겨담는 모습을 시연했다. 한정된 교육시간을 고려하여 2개의 서보모터를 이용한 4축 로봇팔과 1개의 서보모터를 이용한 그래퍼를 사용했다. 나는 이번 팀활동에서 좌표를 추출하고 좌표에 따라 로봇팔이 움직여야하는 위치를 출력하도록 제작했고, 카메라의 직교좌표를 서보모터의 극좌표로 변환하는 역할을 맡았다. 카메라에 찍힌 사람의 손은 xy좌표로 표시되지만 서보모터는 병진운동이 아닌 회전운동을 하므로 직교좌표계를 극좌표계로 변환했다.