로봇 의수ㆍ의족 제작 결과 보고서_김종원
활동 보고서
김*원
2024-08-23
1. 작품의 기능 : 소형화 된 기계 의수로 좁은 공간이나 작은 물체에 대하여 정밀한 작업을 할 수 있다. 2. 설계 및 계획 : 소형 의수 제작 후 기계 팔을 결합하여 손과 팔의 움직임까지 구현 가능하게 한다.
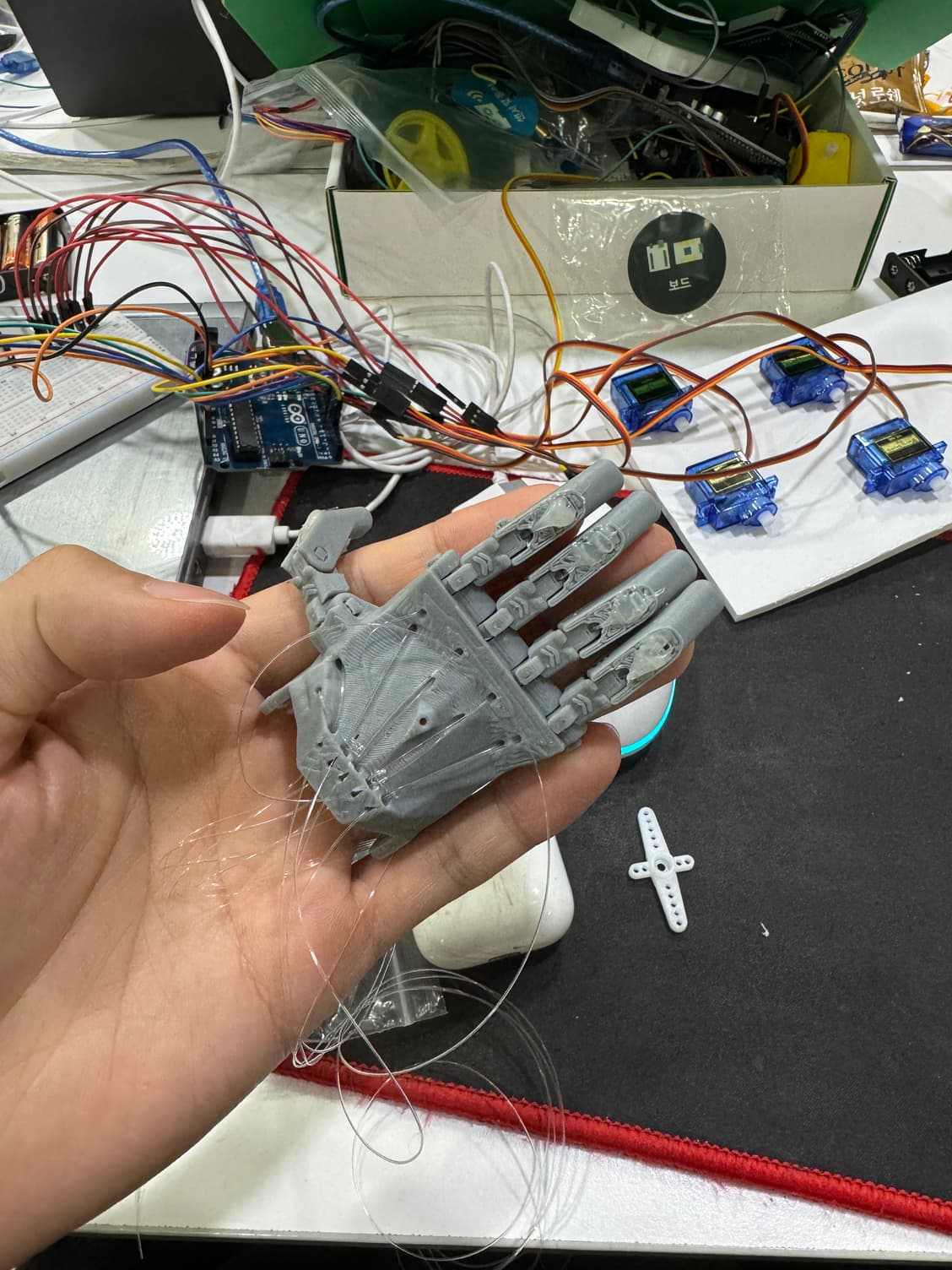

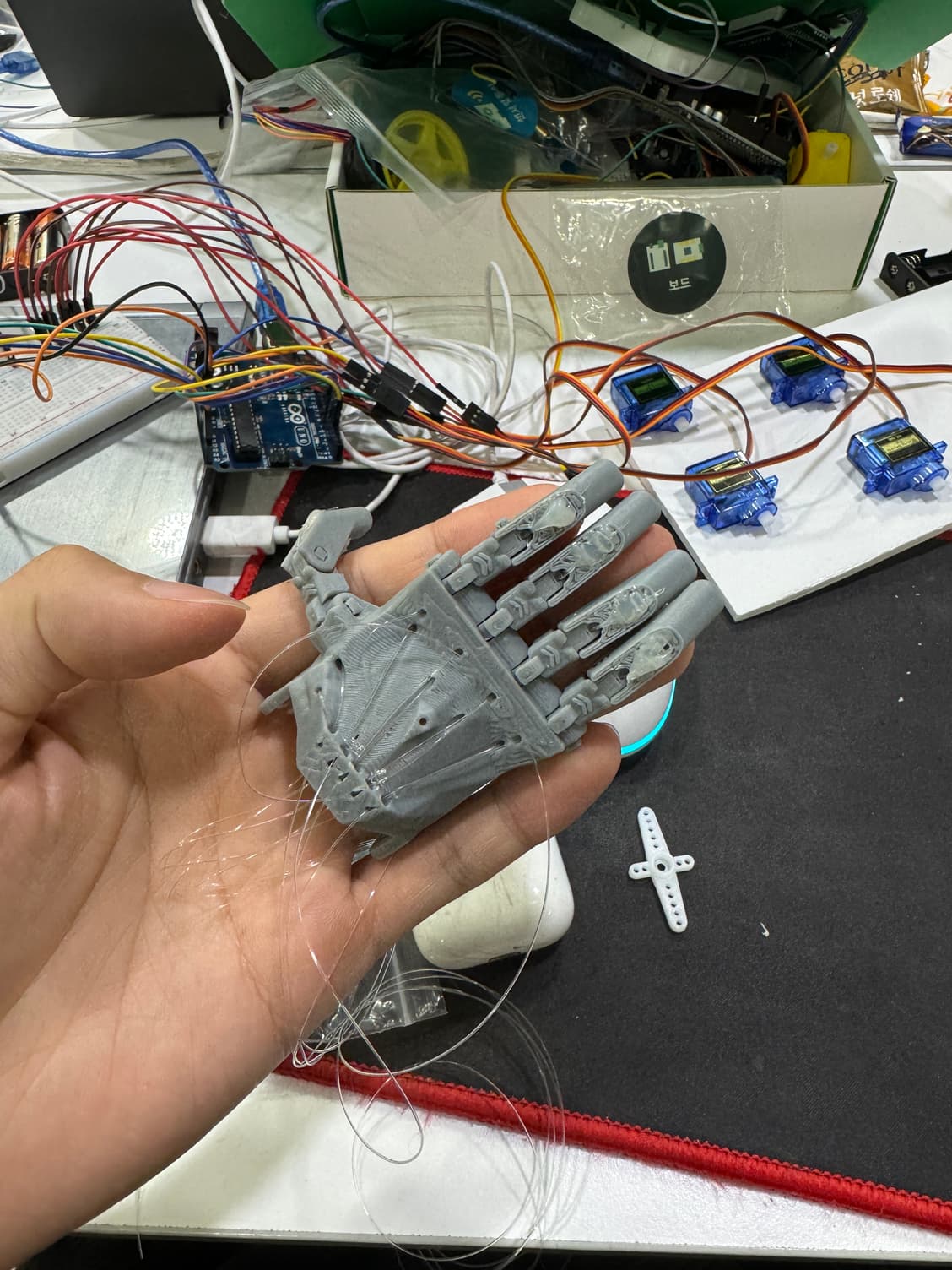
3. 제작과정 : 소형 의수 및 로봇 팔 제작 후 결합한다. 플렉스 센서와 조이스틱을 연결하여 기계 의수를 제어 한다. (의수에 플렉스 센서를 연결), (로봇 팔에 플렉스 센서와 조이스틱을 연결 )


4. 아두이노 코드
코드에디터
언어 선택
입력
실행 결과
이 곳에 결과가 표시됩니다.
5. 어려운 점 및 해결 방법 1.작은 크기의 의수를 제작하여서 큰 사이즈의 의수보다 3D 프린팅이 설계도처럼 나오지 않는 등의 문제가 있었다. 이 문제는 따로 타공을 하거나 수정을 하여 해결하였다. 2. 로봇 팔의 모터가 약해서 의수를 지탱하기 힘들었다. 이 문제는 더 토크가 더 강한 모터로 교체를 하면 해결할 수 있다.
6. 결과 및 결론 결과는 로봇 팔의 힘이 약해서 의수와 결합을 했을 경우에는 생각대로 움직이지 못하였지만 따로 움직였을 경우에는 생각대로 움직여서 성공에 가까웠던 것 같다. 결론은 의수에 대해서 생각을 해본 적이 많지 않았는데 이번 기회에 기계 의수를 만들며 의수에 대해 많이 알아볼 수 있었던 것 같다. 이번 제작은 반 이상의 성공이었지만 다음에는 더 많은 아이디어를 추가하여 의수나 의족까지도 제작을 진행하고 싶다.
