로봇 의수ㆍ의족 제작 결과 보고서_박선철
활동 보고서
박*철
2024-08-23
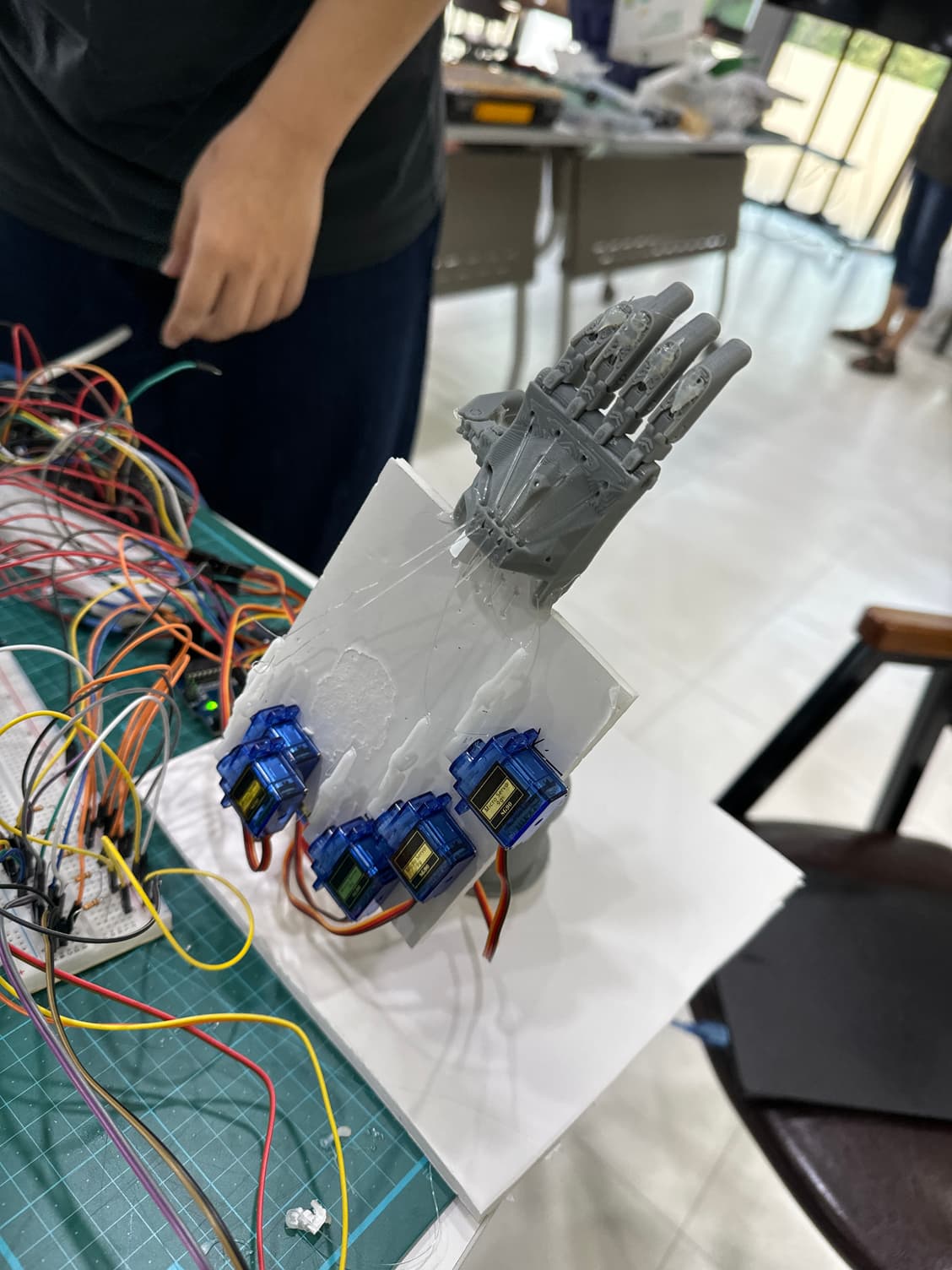
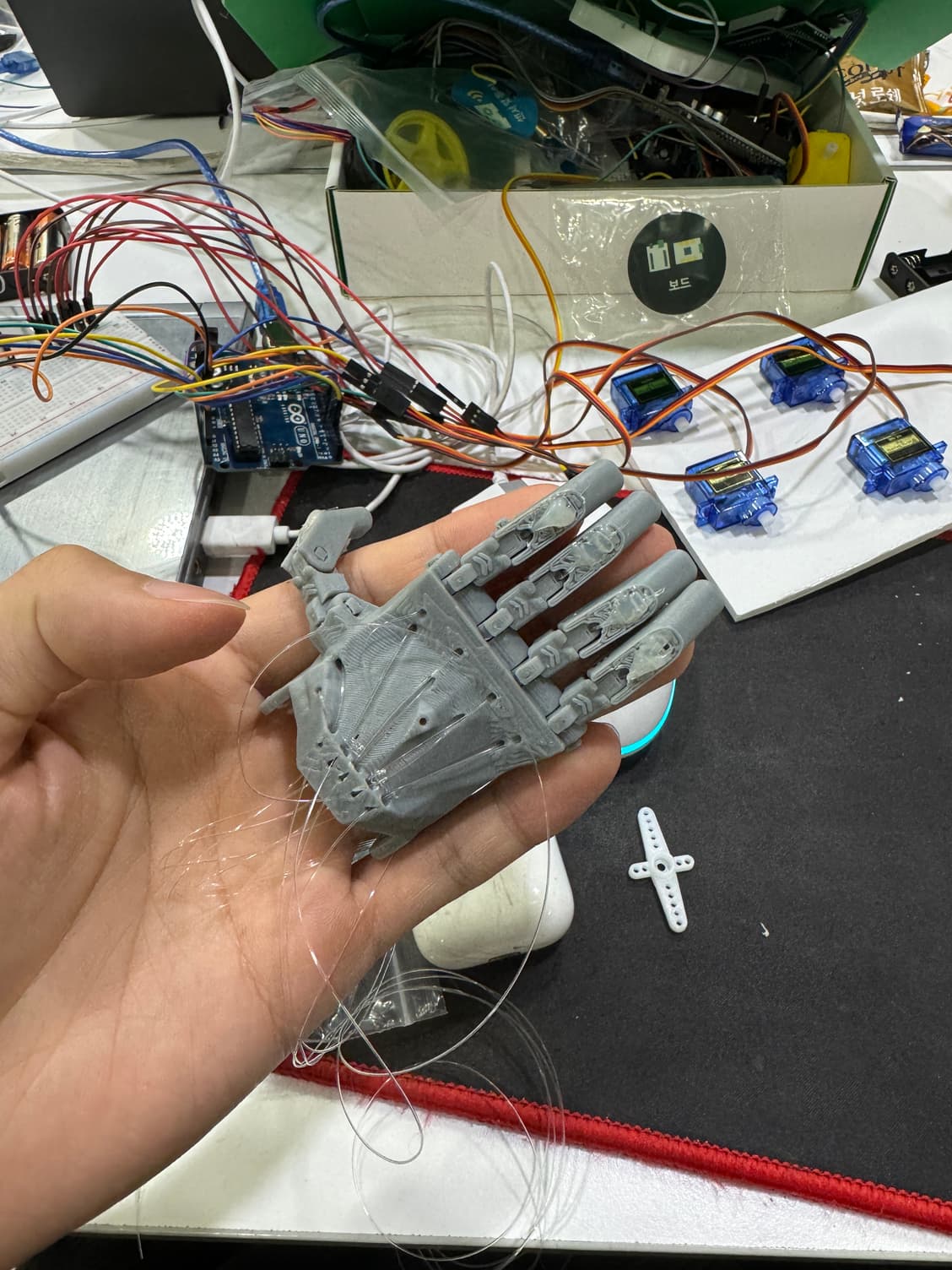
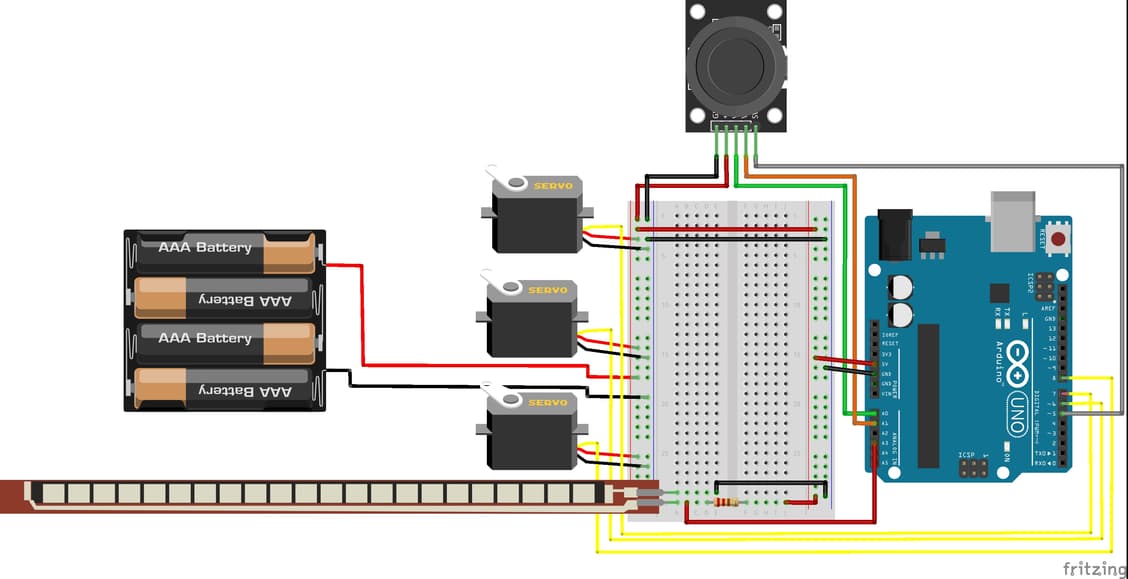
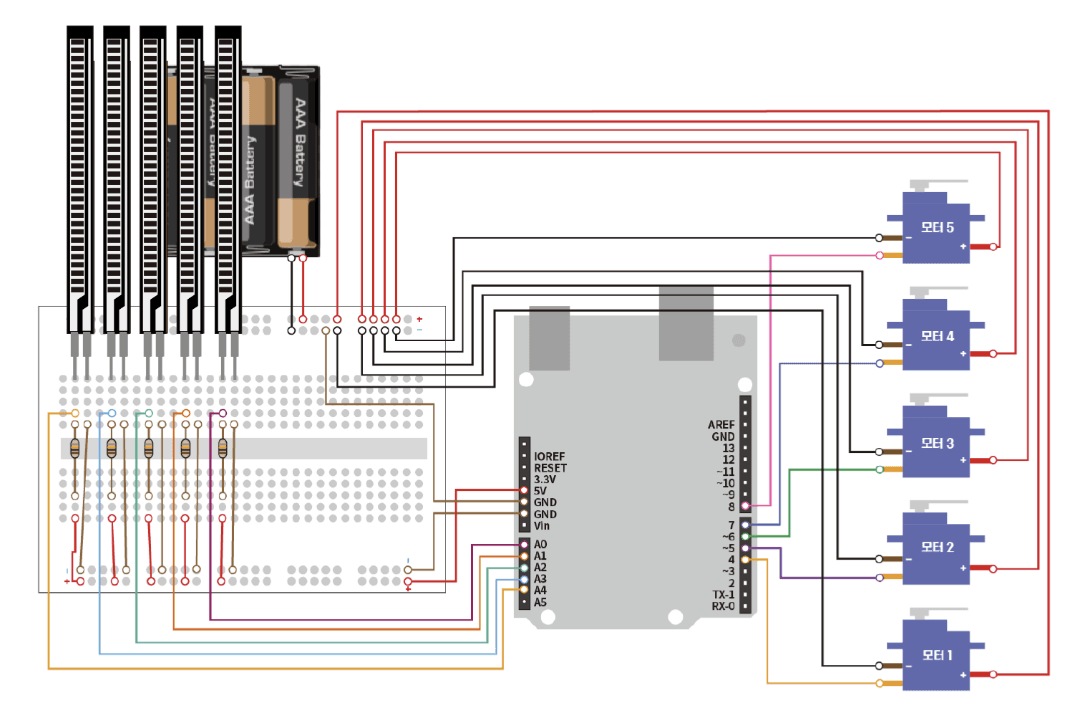
정밀 작업을 위한 소형 의수를 주제로 의수를 제작했다. 우선 소형 의수를 제작하고 그 손을 팔에 장착해서 팔을 제어하여 의수 뿐만 아니라 팔도 자유자재로 움직일 수 있도록 설계했다. 우선 처음으로 3D 프린팅을 뽑았을 때 제작할 의수가 작아서 조립하고 낚시줄을 이용한 텐션을 조절하는데에서 어려움을 겪었다. 의수를 제어하기 위해서 한 손가락에 2개의 낚시줄을 이용했는데 의수의 손가락을 펴지게 하는 낚시줄의 텐션을 주는 것이 가장 고비였다. 낚시줄이 나오는 부분의 아래에 2개의 구멍을 뚫어 텐션을 유지한 체 묶는 방법을 통해서 손가락을 펼칠 수 있었다. 추가로 팔의 모터가 서브모터이다 보니 힘이 약하여 팔을 장착했을 때 잘 버티지 못해서 무너지는 경우가 발생했다. 이는 나중에 더 강한 모터를 장착 시 해결할 수 있을 것 같다. 소형 의수의 경우에는 매우 잘 작동했지만 팔과 결합했을 때 균형을 잡는 것이 어려웠다. 또한 플렉스 센서가 예민하기 때문에 정밀한 조정이 힘들었다. 따라서 속도를 제어할 수 있는 코드를 작성하여 적용하면 괜찮은 의수가 될 것이라고 생각했다.
코드에디터
언어 선택
입력
실행 결과
이 곳에 결과가 표시됩니다.
코드에디터
언어 선택
입력
실행 결과
이 곳에 결과가 표시됩니다.