로봇 의수ㆍ의족 제작 결과 보고서_이용재
활동 보고서
이*재
2024-08-23
작품의 기능은 일렉기타의 파워코드를 칠 수 있는 의수를 목표, 일렉기타는 줄의 장력이 약해 적은 힘으로 칠 수 있으며, 파워코드는 손가락이 2개만 필요하여 쉽게 구현할 수 있을거라 생각하고 시작 시리얼 모니터 입력 > 그에 맞는 코드 문자를 도트그래픽 출력 > 바퀴를 이용한 현 이동 > 손가락의 움직임 순서로 작동되도록 설계


코드에디터
언어 선택
입력
실행 결과
이 곳에 결과가 표시됩니다.
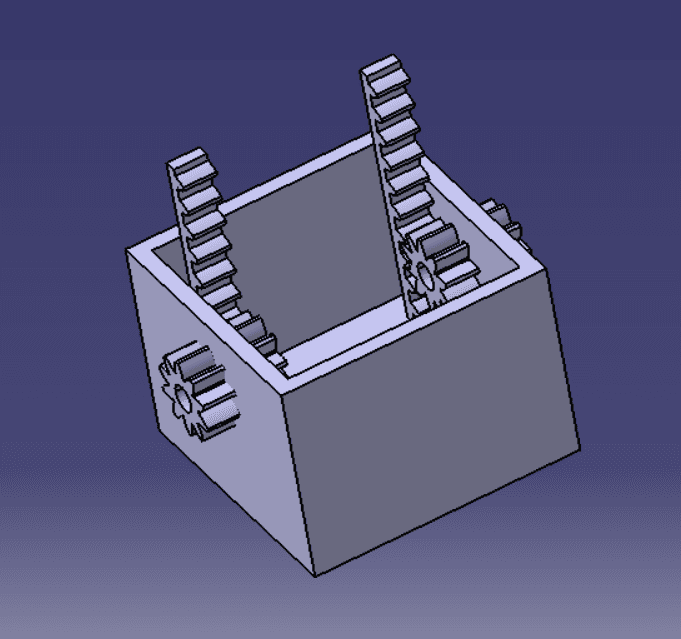
아쉬운점은 크게 3가지. 소나센서의 비정밀성, 바퀴 움직임 가이드의 부재, 손가락의 약한 파워와 비정밀성 소나센서의 비정밀성은 양자화로 인한 오류로 생각. 즉 안정된 값을 얻기에는 힘들어 보입니다. 바퀴움직임 가이드의 부재로 이상적인 이동방향은 직선으로 가야하지만 실제로는 바퀴 움직임 가이드의 부재로 실제 이동방향은 틀어짐. 약한 파워와 비정밀성으로 인해 줄이 제대로 안 울려서 깔끔하지 못한 소리 일명 버징이 나타남 해결방안은 크게 두가지, 터치센서로 변경하고 리모델링을 통한 바퀴가이드 설계, 기어를 이용한 토크 증가. 소나센서를 터치센서로 대체하여 멈춰야할 위치마다 전도성테이프를 붙여 터치인식이 되게끔 사용, 원하는 위치 n번에 가야한다면 터치가 절대값 n-현위치가 될 수 있도록 설정. 그 식에서 절대값의 내부가 음수면 모터 역방향 회전, 양수면 모터 정방향 회전을 합니다. 아래의 사진처럼 기어를 통하여 토크를 증가시키고, 추후에 가이드를 모델링에 추가하여 수정하면 해결될것으로 보임