15051 손은성 로봇 팔 만들기
과제
손*성
2025-03-22
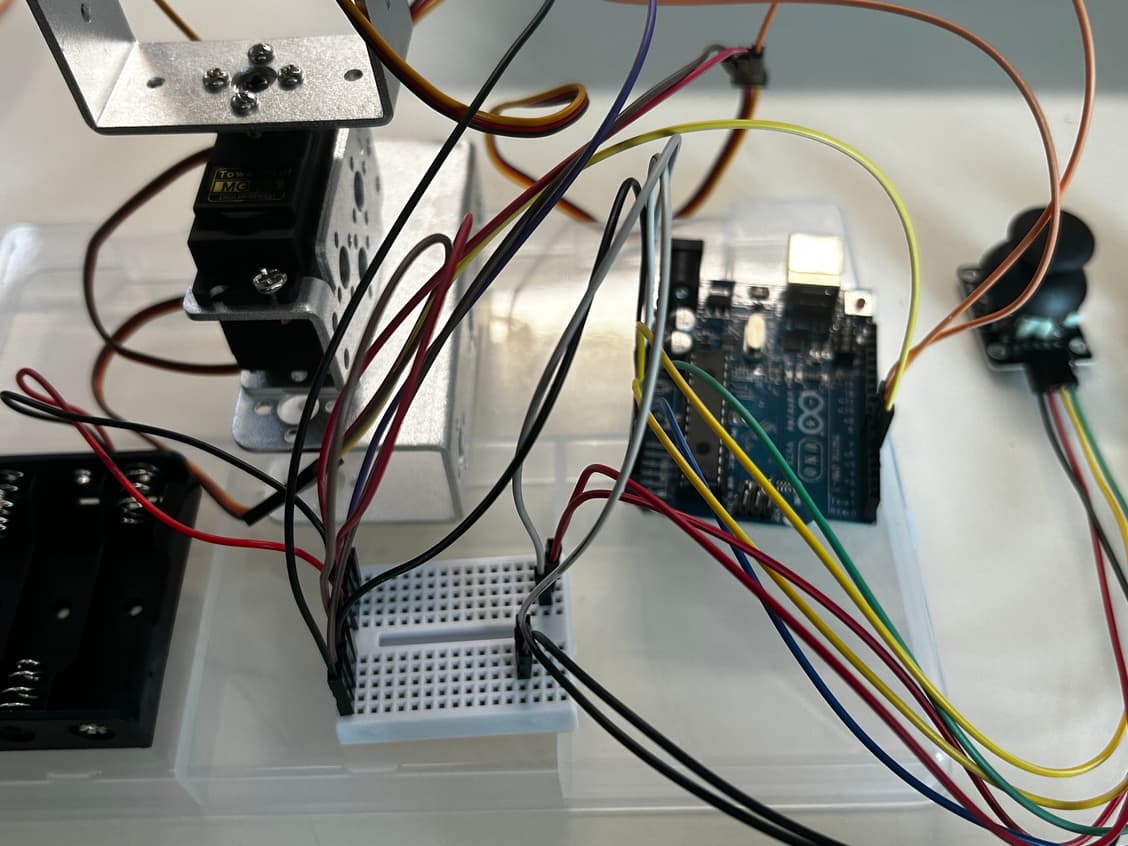
포스텍 영재원에서 로봇 팔 만들기 라는 주제로 하는 온라인 강의를 한다고 하여 재미있겠다 싶어서 신청을 하여 지원하게 되었습니다. 로봇 팔의 주 사용 기술은 피지컬 컴퓨팅으로, 이는 센서, 액추에이터, 마이크로 컨트롤러로 이루어져 있고 여러 입력과 출력을 통해 소통할 수 있도록 하는 기술입니다. 주 사용 도구는 아두이노로, 블록 코딩인 엔트리(Entry)나 스크래치(Scratch)와 같은 블록 코딩 환경 또는 C언어와 같은 텍스트 기반의 코딩을 활용하여 작동하는 장치로 센서와 액추에이터를 쉽게 연결하고 다양한 프로젝트를 구현하게 합니다. 아두이노 프로그래밍을 해보았는데 이는 시리얼 통신을 통해 하였습니다. 시리얼 통신이란 데이터를 비트(bit) 단위로 직렬화하여 한 번에 하나씩 순차적으로 전송하는 통신 방식을 의미합니다. 여기서 입력과 출력을 동일하게 사용해 프로그래밍을 해보았습니다. 로봇 팔의 주요 기능은 조이스틱을 움직였을 때 로봇 팔이 움직이면서 물건을 집게 하는 것입니다. 프로젝트 과정에서 느낀점은 역시나 만들기와 같은 창작 활동은 온라인보다는 오프라인으로 하는것이 훨씬 더 효율적이고 쉽다고 생각했습니다. 또한 코드를 직접 연결하며 스스로 하다 보니 여러가지 부작용들이 많이 발생할 수 있구나 깨닫았습니다.